Was ist ein Rastermikroskop? Rastersondenmikroskop
Karelische Staatliche Pädagogische Universität
Rastersondenmikroskopie
Durchgeführt:
554 gr. (2007)
Rastersondenmikroskop (SPM), sein Aufbau und Funktionsprinzip
Rastersondenmikroskopie (SPM)- eine der leistungsstarken modernen Methoden zur Untersuchung der Morphologie und lokalen Eigenschaften einer festen Oberfläche mit hoher räumlicher Auflösung
Trotz der Vielfalt an Typen und Anwendungen moderner Rastermikroskope basieren ihre Funktionsweisen auf ähnlichen Prinzipien und ihre Konstruktionen unterscheiden sich kaum voneinander. In Abb. Abbildung 1 zeigt ein verallgemeinertes Diagramm eines Rastersondenmikroskops (SPM).
Abb. 1 Verallgemeinertes Diagramm eines Rastersondenmikroskops (SPM).
Das Funktionsprinzip ist wie folgt. Über ein Grobpositionierungssystem wird die Messsonde an die Oberfläche des Prüflings herangeführt. Wenn sich Probe und Sonde in einem Abstand von weniger als hundert Nanometern nähern, beginnt die Sonde mit den Oberflächenstrukturen der analysierten Oberfläche zu interagieren. Die Sonde bewegt sich mithilfe einer Scanvorrichtung entlang der Oberfläche der Probe, wodurch die Oberfläche mit der Sondennadel abgetastet wird. Normalerweise handelt es sich um ein Rohr aus Piezokeramik, auf dessen Oberfläche drei Paare getrennter Elektroden angebracht sind. Unter dem Einfluss der an das Piezorohr angelegten Spannungen Ux und Uy biegt es sich und sorgt so für eine Bewegung der Sonde relativ zur Probe entlang der X- und Y-Achse; unter dem Einfluss der Spannung Uz wird es gestaucht oder gedehnt, was dies ermöglicht Ändern Sie den Abstand zwischen Nadel und Probe.
Der piezoelektrische Effekt in Kristallen wurde 1880 von den Brüdern P. und J. Curie entdeckt, die das Auftreten elektrostatischer Ladungen auf der Oberfläche von Platten beobachteten, die in einer bestimmten Ausrichtung aus einem Quarzkristall unter dem Einfluss mechanischer Beanspruchung geschnitten wurden. Diese Ladungen sind proportional zur mechanischen Belastung, wechseln mit ihr das Vorzeichen und verschwinden, wenn sie entfernt wird.
Die Bildung elektrostatischer Ladungen auf der Oberfläche eines Dielektrikums und das Auftreten einer elektrischen Polarisation im Inneren durch mechanische Beanspruchung wird als direkter piezoelektrischer Effekt bezeichnet.
Neben dem direkten gibt es einen umgekehrten piezoelektrischen Effekt, der darin besteht, dass in einer aus einem piezoelektrischen Kristall geschnittenen Platte unter dem Einfluss eines an sie angelegten elektrischen Feldes eine mechanische Verformung auftritt; Darüber hinaus ist die Größe der mechanischen Verformung proportional zur elektrischen Feldstärke. Der piezoelektrische Effekt wird nur in festen Dielektrika beobachtet, hauptsächlich in kristallinen. In Strukturen, die ein Symmetriezentrum haben, kann keine gleichmäßige Verformung das innere Gleichgewicht des Kristallgitters stören, und daher sind nur 20 Klassen von Kristallen, die kein Symmetriezentrum haben, piezoelektrisch. Das Fehlen eines Symmetriezentrums ist eine notwendige, aber nicht hinreichende Bedingung für die Existenz des piezoelektrischen Effekts und daher weisen ihn nicht alle azentrischen Kristalle auf.
Der piezoelektrische Effekt kann in festen amorphen und kryptokristallinen Dielektrika nicht beobachtet werden. (Piezoelektrika – Einkristalle: Quarz. Die piezoelektrischen Eigenschaften von Quarz werden in der Technik häufig genutzt, um Radiofrequenzen zu stabilisieren und zu filtern, Ultraschallschwingungen zu erzeugen und mechanische Größen zu messen. Turmalin. Der Hauptvorteil von Turmalin ist der höhere Wert des Partialkoeffizienten im Vergleich zu Quarz. Dadurch sowie aufgrund der höheren mechanischen Festigkeit des Turmalins ist es möglich, Resonatoren für höhere Frequenzen herzustellen.
Derzeit wird Turmalin kaum für die Herstellung piezoelektrischer Resonatoren verwendet und ist nur begrenzt für die Messung des hydrostatischen Drucks geeignet.
Rochette-Salz. Piezoelektrische Elemente aus Rochelle-Salz wurden häufig in Geräten verwendet, die in einem relativ engen Temperaturbereich betrieben wurden, insbesondere in Tonabnehmern. Derzeit werden sie jedoch fast vollständig durch keramische Piezoelemente ersetzt.
Der Sondenpositionssensor überwacht kontinuierlich die Position der Sonde relativ zur Probe und übermittelt über ein Rückkopplungssystem Daten darüber an das Computersystem, das die Bewegung des Scanners steuert. Zur Erfassung der Wechselwirkungskräfte zwischen einer Sonde und einer Oberfläche wird üblicherweise ein Verfahren verwendet, das auf der Aufzeichnung der Ablenkung eines von der Sondenspitze reflektierten Halbleiterlaserstrahls basiert. Bei Mikroskopen dieser Art fällt ein reflektierter Lichtstrahl in die Mitte einer nach einer Differenzschaltung geschalteten zwei- oder vierteiligen Photodiode. Das Computersystem dient neben der Steuerung des Scanners auch der Verarbeitung der Daten der Sonde sowie der Analyse und Anzeige der Ergebnisse der Oberflächenforschung.

Wie Sie sehen, ist der Aufbau des Mikroskops recht einfach. Das Hauptinteresse gilt der Wechselwirkung der Sonde mit der untersuchten Oberfläche. Es ist die Art der Interaktion, die ein bestimmtes Rastersondenmikroskop verwendet, die seine Fähigkeiten und seinen Anwendungsbereich bestimmt. (Folie) Wie der Name schon sagt, ist eines der Hauptelemente eines Rastersondenmikroskops eine Sonde. Ein gemeinsames Merkmal aller Rastersondenmikroskope ist die Methode, Informationen über die Eigenschaften der untersuchten Oberfläche zu erhalten. Die mikroskopische Sonde nähert sich der Oberfläche, bis ein Gleichgewicht der Wechselwirkungen bestimmter Art zwischen der Sonde und der Probe hergestellt ist. Anschließend wird das Scannen durchgeführt.
Rastertunnelmikroskop (STM), sein Aufbau und Funktionsprinzip
Der erste Prototyp von SPM war das 1981 erfundene Rastertunnelmikroskop (STM). von den Wissenschaftlern des IBM Forschungslabors in Zürich, Gerhard Binnig und Heinrich Röhrer. Mit seiner Hilfe konnten erstmals reale Bilder von Oberflächen mit atomarer Auflösung gewonnen werden, insbesondere eine 7x7-Rekonstruktion auf einer Siliziumoberfläche (Abb. 2).

Abb. 3 STM-Bild der Oberfläche von monokristallinem Silizium. Rekonstruktion 7 x 7
Alle derzeit bekannten SPM-Methoden lassen sich in drei Hauptgruppen einteilen:
– Rastertunnelmikroskopie; STM verwendet eine scharfe leitende Nadel als Sonde
Wenn zwischen Spitze und Probe eine Vorspannung angelegt wird, entsteht zwischen ihnen, wenn sich die Nadelspitze der Probe in einem Abstand von etwa 1 nm nähert, ein Tunnelstrom, dessen Größe vom Nadel-Proben-Abstand abhängt. und die Richtung von der Polarität der Spannung (Abb. 4). Wenn sich die Nadelspitze von der zu untersuchenden Oberfläche entfernt, nimmt der Tunnelstrom ab und bei Annäherung nimmt er zu. Somit ist es möglich, anhand von Daten über den Tunnelstrom an einem bestimmten Satz von Oberflächenpunkten ein Bild der Oberflächentopographie zu erstellen.

Abb. 4 Diagramm zum Auftreten von Tunnelstrom.
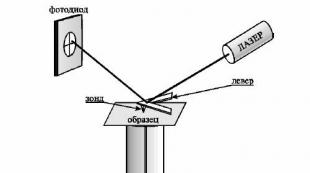
- Rasterkraftmikroskopie; Es zeichnet Änderungen der Anziehungskraft der Nadel auf die Oberfläche von Punkt zu Punkt auf. Die Nadel befindet sich am Ende eines Auslegerbalkens (Ausleger), der eine bekannte Steifigkeit aufweist und sich unter der Wirkung kleiner Van-der-Waals-Kräfte, die zwischen der untersuchten Oberfläche und der Spitze der Spitze entstehen, biegen kann. Die Verformung des Cantilevers wird durch die Ablenkung eines auf seine Rückseite einfallenden Laserstrahls oder durch Nutzung des piezoresistiven Effekts aufgezeichnet, der beim Biegen im Cantilever selbst auftritt;
– optische Nahfeldmikroskopie; Dabei ist die Sonde ein optischer Wellenleiter (Faser), der sich am der Probe zugewandten Ende auf einen Durchmesser verjüngt, der kleiner als die Wellenlänge des Lichts ist. In diesem Fall verlässt die Lichtwelle den Wellenleiter nicht über eine weite Strecke, sondern „fällt“ nur geringfügig aus seiner Spitze heraus. Am anderen Ende des Wellenleiters sind ein Laser und ein Empfänger für das vom freien Ende reflektierte Licht installiert. Bei einem kleinen Abstand zwischen der zu untersuchenden Oberfläche und der Sondenspitze ändern sich Amplitude und Phase der reflektierten Lichtwelle, die als Signal für die Erstellung eines dreidimensionalen Bildes der Oberfläche dient.
Je nach Tunnelstrom bzw. Abstand der Nadel zur Oberfläche sind zwei Betriebsarten des Rastertunnelmikroskops möglich. Im Konstanthöhenmodus bewegt sich die Nadelspitze in einer horizontalen Ebene über der Probe und der Tunnelstrom variiert je nach Abstand zur Probe (Abb. 5a). Das Informationssignal ist in diesem Fall die Größe des Tunnelstroms, der an jedem Abtastpunkt der Probenoberfläche gemessen wird. Basierend auf den erhaltenen Werten des Tunnelstroms wird ein Bild der Topographie erstellt.

Reis. 5. STM-Betriebsdiagramm: a – im Konstanthöhenmodus; b - im Gleichstrommodus
Im Konstantstrommodus sorgt das Mikroskop-Feedbacksystem für einen konstanten Tunnelstrom, indem es den Nadel-Proben-Abstand an jedem Scanpunkt anpasst (Abb. 5b). Es überwacht Änderungen im Tunnelstrom und steuert die an das Scangerät angelegte Spannung, um diese Änderungen auszugleichen. Mit anderen Worten: Wenn der Strom ansteigt, bewegt das Rückkopplungssystem die Sonde von der Probe weg, und wenn er abnimmt, bringt es sie näher. In diesem Modus wird das Bild auf der Grundlage von Daten über die Größe der vertikalen Bewegungen des Scangeräts erstellt.
Beide Modi haben ihre Vor- und Nachteile. Der Modus „Konstante Höhe“ liefert schnellere Ergebnisse, jedoch nur für relativ glatte Oberflächen. Im Konstantstrommodus können unregelmäßige Oberflächen mit hoher Genauigkeit gemessen werden, allerdings dauern die Messungen länger.
Dank ihrer hohen Empfindlichkeit haben Rastertunnelmikroskope der Menschheit die Möglichkeit gegeben, die Atome von Leitern und Halbleitern zu sehen. Aufgrund von Designeinschränkungen ist es jedoch nicht möglich, nichtleitende Materialien mit STM abzubilden. Darüber hinaus ist es für einen qualitativ hochwertigen Betrieb eines Tunnelmikroskops notwendig, eine Reihe sehr strenger Bedingungen zu erfüllen, insbesondere den Betrieb im Vakuum und eine spezielle Probenvorbereitung. Obwohl man also nicht sagen kann, dass der erste Pfannkuchen von Binnig und Röhrer klumpig geworden ist, ist das Produkt etwas roh geworden.
Fünf Jahre vergingen und Gerhard Binning erfand zusammen mit Calvin Quaite und Christopher Gerber einen neuen Mikroskoptyp, den sie Rasterkraftmikroskop (AFM) nannten, für den im selben Jahr 1986. G. Binnig und H. Röhrer wurden mit dem Nobelpreis für Physik ausgezeichnet. Das neue Mikroskop ermöglichte es, die Einschränkungen seines Vorgängers zu überwinden. Mithilfe von AFM ist es möglich, die Oberfläche sowohl leitender als auch nichtleitender Materialien mit atomarer Auflösung und unter atmosphärischen Bedingungen abzubilden. Ein zusätzlicher Vorteil von Rasterkraftmikroskopen ist die Möglichkeit, neben der Messung der Topographie von Oberflächen auch deren elektrische, magnetische, elastische und andere Eigenschaften sichtbar zu machen.
Rasterkraftmikroskop (AFM), sein Aufbau und Funktionsprinzip
Der wichtigste Bestandteil von ACM (Rasterkraftmikroskop) sind Rastersonden – Ausleger; die Eigenschaften des Mikroskops hängen direkt von den Eigenschaften des Auslegers ab.
Der Ausleger ist ein flexibler Balken (175 x 40 x 4 Mikrometer – Durchschnittsdaten) mit einem bestimmten Steifigkeitskoeffizienten k(10-3 – 10 N/m), an dessen Ende sich eine Mikronadel befindet (Abb. 1). Bereich der Änderung des Krümmungsradius R Mit der Entwicklung des AFM veränderte sich die Nadelspitze von 100 auf 5 nm. Offensichtlich mit einem Rückgang R Das Mikroskop ermöglicht Bilder mit höherer Auflösung. Nadelspitzenwinkel A- ebenfalls eine wichtige Eigenschaft der Sonde, von der die Bildqualität abhängt. A Bei verschiedenen Auslegern variiert sie zwischen 200 und 700, es ist nicht schwer anzunehmen, dass sie kleiner ist A, desto höher ist die Qualität des resultierenden Bildes.
https://pandia.ru/text/78/034/images/image007_32.gif" width="113 height=63" height="63">,
also zu erhöhen w0 Die Länge des Auslegers (von der der Steifigkeitskoeffizient abhängt) liegt in der Größenordnung von mehreren Mikrometern und die Masse überschreitet 10-10 kg nicht. Die Resonanzfrequenzen verschiedener Cantilever liegen zwischen 8 und 420 kHz.
Die Scanmethode mit AFM ist wie folgt (Abbildung 2) : Die Sondennadel befindet sich über der Oberfläche der Probe, während sich die Sonde relativ zur Probe bewegt, wie ein Strahl in einer Kathodenstrahlröhre auf einem Fernseher (zeilenweises Scannen). Ein auf die Oberfläche der Sonde gerichteter Laserstrahl (der sich entsprechend der Probenlandschaft biegt) wird reflektiert und trifft auf einen Fotodetektor, der die Abweichungen des Strahls aufzeichnet. In diesem Fall wird die Auslenkung der Nadel beim Scannen durch die interatomare Wechselwirkung der Probenoberfläche mit ihrer Spitze verursacht. Mithilfe der Computerverarbeitung von Fotodetektorsignalen ist es möglich, dreidimensionale Bilder der Oberfläche der untersuchten Probe zu erhalten.
https://pandia.ru/text/78/034/images/image009_11.jpg" width="250" height="246">
Reis. 8. Abhängigkeit der Kraft der interatomaren Wechselwirkung vom Abstand zwischen Spitze und Probe
Die Wechselwirkungskräfte zwischen Sonde und Oberfläche werden in Nah- und Fernkräfte unterteilt. Kurzreichweitige Kräfte entstehen in einem Abstand in der Größenordnung von 1-10 A, wenn die Elektronenhüllen der Atome der Nadelspitze und der Oberfläche, die sich überlappen, mit zunehmendem Abstand schnell abnehmen. Nur wenige Atome (im Grenzfall eines) der Nadelspitze treten in Nahwechselwirkung mit Oberflächenatomen. Bei der Abbildung einer Oberfläche mit dieser Art von Kraft arbeitet das AFM im Kontaktmodus.
Es gibt einen Kontaktscanmodus, bei dem die Sondennadel die Oberfläche der Probe berührt, einen intermittierenden Modus – beim Scannen berührt die Sonde periodisch die Oberfläche der Probe und einen berührungslosen Modus, bei dem die Sonde mehrere Nanometer von der gescannten Oberfläche entfernt ist (Letzterer Scanmodus wird selten verwendet, da die Wechselwirkungskräfte zwischen Sonde und Probe praktisch schwer zu bestimmen sind.)
Möglichkeiten von Private Label
Mit STM lernte man nicht nur, einzelne Atome zu unterscheiden, sondern auch ihre Form zu bestimmen.
Viele haben noch nicht ganz erkannt, dass Rastertunnelmikroskope (STM) in der Lage sind, einzelne Atome zu erkennen, obwohl der nächste Schritt bereits getan ist: Es ist nun möglich, sogar zu bestimmen Formen eines einzelnen Atoms im realen Raum (genauer gesagt, die Form der Elektronendichteverteilung um den Atomkern).
Optisches Nahfeldmikroskop, sein Aufbau und Funktionsprinzip
Optische Nahfeldmikroskopie; Dabei ist die Sonde ein optischer Wellenleiter (Faser), der sich am der Probe zugewandten Ende auf einen Durchmesser verjüngt, der kleiner als die Wellenlänge des Lichts ist. In diesem Fall verlässt die Lichtwelle den Wellenleiter nicht über eine weite Strecke, sondern „fällt“ nur geringfügig aus seiner Spitze heraus. Am anderen Ende des Wellenleiters sind ein Laser und ein Empfänger für das vom freien Ende reflektierte Licht installiert. Bei einem kleinen Abstand zwischen der zu untersuchenden Oberfläche und der Sondenspitze ändern sich Amplitude und Phase der reflektierten Lichtwelle, die als Signal für die Erstellung eines dreidimensionalen Bildes der Oberfläche dient.
Wenn Sie Licht zwingen, durch eine Membran mit einem Durchmesser von 50-100 nm zu dringen und es auf einen Abstand von mehreren zehn Nanometern an die Oberfläche der zu untersuchenden Probe heranzubringen, dann bewegen Sie ein solches „ “ von einem Punkt aus entlang der Oberfläche Mit einem Punkt (und einem ausreichend empfindlichen Detektor) können Sie die optischen Eigenschaften dieser Probe in einem lokalen Bereich untersuchen, der der Lochgröße entspricht.
Genau so funktioniert ein optisches Rasternahfeldmikroskop (SNOM). Die Rolle des Lochs (Subwellenlängenmembran) wird normalerweise von einer optischen Faser übernommen, deren eines Ende spitz ist und überall mit einer dünnen Metallschicht bedeckt ist, mit Ausnahme eines kleinen Bereichs ganz an der Spitze der Spitze (der Durchmesser der „ Der staubfreie Bereich beträgt nur 50-100 nm). Vom anderen Ende aus gelangt Licht vom Laser in eine solche Faser.
Dezember 2005 Rastersondenmikroskope NanoEducator, speziell entwickelt von der Firma NT-MDT (Zelenograd, Russland) für Laborarbeiten... Die Geräte richten sich an ein studentisches Publikum: Sie werden vollständig über einen Computer gesteuert, verfügen über eine einfache und intuitive Benutzeroberfläche und unterstützen Animationen und beinhalten eine schrittweise Entwicklung der Techniken.

Abb. 10 Rastersondenmikroskopie-Labor
Die Entwicklung der Rastersondenmikroskopie diente als Grundlage für die Entwicklung einer neuen Richtung in der Nanotechnologie – der Sonden-Nanotechnologie.
Literatur
1. Binnig G., Rohrer H., Gerber Ch., Weibel E. 7 i 7 Rekonstruktion auf Si(111) im realen Raum aufgelöst // Phys. Rev. Lette. 1983. Bd. 50, Nr. 2. S. 120-123. Diese berühmte Veröffentlichung läutete die Ära des Private Labeling ein.
2. http://www. *****/obrazovanie/stsoros/1118.html
3. http://ru. Wikipedia. org
4. http://www. *****/SPM-Techniques/Principles/aSNOM_techniques/Scanning_Plasmon_Near-field_Microscopy_mode94.html
5. http://scireg. *****.
6. http://www. *****/Artikelliste. html
Die ersten Geräte, die es ermöglichten, Nanoobjekte zu beobachten und zu bewegen, waren Rastersondenmikroskope – ein Rasterkraftmikroskop und ein Rastertunnelmikroskop, die nach einem ähnlichen Prinzip arbeiteten. Die Rasterkraftmikroskopie (AFM) wurde von G. Binnig und G. Rohrer entwickelt, die für diese Forschung 1986 den Nobelpreis erhielten. Die Entwicklung eines Rasterkraftmikroskops, das in der Lage ist, die zwischen einzelnen Atomen entstehenden Anziehungs- und Abstoßungskräfte zu spüren, hat es endlich ermöglicht, Nanoobjekte zu „berühren und zu sehen“.
Abbildung 9. Funktionsprinzip eines Rastersondenmikroskops (aus http://www.nanometer.ru/2007/06/06/atomno_silovaa_mikroskopia_2609.html#). Die gestrichelte Linie zeigt den Weg des Laserstrahls. Weitere Erläuterungen finden Sie im Text.
Die Basis von AFM (siehe Abb. 9) ist eine Sonde, die normalerweise aus Silizium besteht und eine dünne Auslegerplatte darstellt (sie wird Ausleger genannt, vom englischen Wort „Cantilever“ – Konsole, Balken). Am Ende des Auslegers (Länge » 500 µm, Breite » 50 µm, Dicke » 1 µm) befindet sich eine sehr scharfe Spitze (Länge » 10 µm, Krümmungsradius von 1 bis 10 nm), die in einer Einsengruppe endet oder mehr Atome (siehe Abb. 10).
Abbildung 10. Elektronenmikrofotos derselben Sonde, aufgenommen bei niedriger (oben) und hoher Vergrößerung.
Wenn sich die Mikrosonde entlang der Oberfläche der Probe bewegt, hebt und senkt sich die Spitze des Dorns und zeichnet das Mikrorelief der Oberfläche nach, genau wie ein Grammophonstift über eine Schallplatte gleitet. Am hervorstehenden Ende des Cantilevers (oberhalb des Dorns, siehe Abb. 9) befindet sich eine Spiegelfläche, auf die der Laserstrahl fällt und reflektiert wird. Wenn sich die Spitze auf Oberflächenunregelmäßigkeiten senkt und anhebt, wird der reflektierte Strahl abgelenkt, und diese Abweichung wird von einem Fotodetektor aufgezeichnet, und die Kraft, mit der die Spitze von nahegelegenen Atomen angezogen wird, wird von einem piezoelektrischen Sensor aufgezeichnet.
Daten vom Fotodetektor und piezoelektrischen Sensor werden in einem Rückkopplungssystem verwendet, das beispielsweise einen konstanten Wert der Wechselwirkungskraft zwischen der Mikrosonde und der Probenoberfläche liefern kann. Dadurch ist es möglich, in Echtzeit ein volumetrisches Relief der Probenoberfläche zu konstruieren. Die Auflösung der AFM-Methode beträgt ca. 0,1–1 nm horizontal und 0,01 nm vertikal. Ein Bild von Escherichia coli-Bakterien, das mit einem Rastersondenmikroskop aufgenommen wurde, ist in Abb. dargestellt. elf.
Abbildung 11. Escherichia coli-Bakterium ( Escherichia coli). Das Bild wurde mit einem Rastersondenmikroskop aufgenommen. Die Länge des Bakteriums beträgt 1,9 Mikrometer, die Breite 1 Mikrometer. Die Dicke der Geißeln und Zilien beträgt 30 nm bzw. 20 nm.
Eine andere Gruppe von Rastersondenmikroskopen nutzt den sogenannten quantenmechanischen „Tunneleffekt“ zur Konstruktion von Oberflächenreliefs. Das Wesen des Tunneleffekts besteht darin, dass der elektrische Strom zwischen einer scharfen Metallnadel und einer Oberfläche in einem Abstand von etwa 1 nm von diesem Abstand abhängt – je kleiner der Abstand, desto größer der Strom. Wenn zwischen der Nadel und der Oberfläche eine Spannung von 10 V angelegt wird, kann dieser „Tunnelstrom“ zwischen 10 pA und 10 nA liegen. Indem dieser Strom gemessen und konstant gehalten wird, kann auch der Abstand zwischen Nadel und Oberfläche konstant gehalten werden. Dadurch können Sie ein volumetrisches Profil der Oberfläche erstellen (siehe Abb. 12). Im Gegensatz zu einem Rasterkraftmikroskop kann ein Rastertunnelmikroskop nur die Oberflächen von Metallen oder Halbleitern untersuchen.
Abbildung 12. Die Nadel eines Rastertunnelmikroskops befindet sich in einem konstanten Abstand (siehe Pfeile) über den Atomschichten der untersuchten Oberfläche.
Ein Rastertunnelmikroskop kann auch verwendet werden, um ein Atom an einen vom Bediener gewählten Punkt zu bewegen. Wenn beispielsweise die Spannung zwischen der Mikroskopnadel und der Oberfläche der Probe etwas höher eingestellt wird, als zur Untersuchung dieser Oberfläche erforderlich ist, verwandelt sich das Probenatom, das ihm am nächsten ist, in ein Ion und „springt“ zur Nadel. Anschließend können Sie durch leichte Bewegung der Nadel und Änderung der Spannung das entwichene Atom dazu zwingen, an die Oberfläche der Probe zurückzuspringen. Auf diese Weise ist es möglich, Atome zu manipulieren und Nanostrukturen zu erzeugen, d. h. Strukturen auf der Oberfläche mit Abmessungen in der Größenordnung eines Nanometers. Dass dies möglich ist, zeigten IBM-Mitarbeiter bereits 1990, indem sie den Namen ihres Unternehmens aus 35 Xenon-Atomen auf einer Nickelplatte kombinierten (siehe Abb. 13).
Abbildung 13. Der Name der Firma IBM besteht aus 35 Xenon-Atomen auf einer Nickelplatte, die 1990 von Mitarbeitern dieser Firma mit einem Rastersondenmikroskop hergestellt wurde.
Mit einem Sondenmikroskop können Sie Atome nicht nur bewegen, sondern auch die Voraussetzungen für ihre Selbstorganisation schaffen. Befindet sich beispielsweise ein Wassertropfen, der Thiolionen enthält, auf einer Metallplatte, hilft die Mikroskopsonde dabei, diese Moleküle so auszurichten, dass ihre beiden Kohlenwasserstoffschwänze von der Platte weg zeigen. Dadurch ist es möglich, eine Monoschicht aus Thiolmolekülen aufzubauen, die auf einer Metallplatte haftet (siehe Abb. 14). Diese Methode zur Erzeugung einer Monoschicht aus Molekülen auf einer Metalloberfläche wird „Stift-Nanolithographie“ genannt.
Abbildung 14. Oben links – Ausleger (stahlgrau) eines Rastersondenmikroskops über einer Metallplatte. Auf der rechten Seite sehen Sie eine vergrößerte Ansicht des Bereichs (in der Abbildung links weiß umrandet) unter der Spitze des Auslegers, der schematisch Thiolmoleküle mit violetten Kohlenwasserstoffschwänzen zeigt, die in einer Monoschicht an der Spitze der Sonde angeordnet sind. Adaptiert aus Scientific American, 2001, September, S. 44.
7. Verwendung eines Rastersondenmikroskops zur Untersuchung biologischer Objekte
7. Anwendung eines Rastersondenmikroskops zur Untersuchung biologischer Objekte 1
7.1. Arbeitsziele 2
7.2. Lehrerinformationen 3
7.4. Richtlinien 31
7.5. Sicherheit 32
7.6. Aufgabe 32
7.7. Testfragen 32
7.8. Literatur 32
Die Laborarbeit wurde von der Staatlichen Universität Nischni Nowgorod entwickelt. N.I. Lobatschewski
7.1.Ziele der Arbeit
Die Untersuchung der morphologischen Parameter biologischer Strukturen ist eine wichtige Aufgabe für Biologen, da die Größe und Form einiger Strukturen ihre physiologischen Eigenschaften maßgeblich bestimmen. Durch den Vergleich morphologischer Daten mit funktionellen Merkmalen kann man umfassende Informationen über die Beteiligung lebender Zellen an der Aufrechterhaltung des physiologischen Gleichgewichts des menschlichen oder tierischen Körpers erhalten.
Bisher hatten Biologen und Mediziner die Möglichkeit, ihre Präparate nur mit optischen und Elektronenmikroskopen zu untersuchen. Diese Studien lieferten einige Einblicke in die Morphologie von Zellen, die durch Sputtern fixiert, gefärbt und mit dünnen Metallbeschichtungen beschichtet wurden. Es war nicht möglich, die Morphologie lebender Objekte und ihre Veränderungen unter dem Einfluss verschiedener Faktoren zu untersuchen, aber es war sehr verlockend.
Die Rastersondenmikroskopie (Rastersondenmikroskopie, SPM) hat neue Möglichkeiten für die Untersuchung von Zellen, Bakterien, biologischen Molekülen und DNA unter Bedingungen eröffnet, die den nativen Bedingungen so nahe wie möglich kommen. Mit SPM können Sie biologische Objekte ohne spezielle Fixiermittel und Farbstoffe an der Luft oder sogar in einem flüssigen Medium untersuchen.
Derzeit wird SPM in den unterschiedlichsten Disziplinen eingesetzt, sowohl in der wissenschaftlichen Grundlagenforschung als auch in angewandten High-Tech-Entwicklungen. Viele Forschungsinstitute im Land sind mit Sondenmikroskopiegeräten ausgestattet. In diesem Zusammenhang wächst der Bedarf an hochqualifizierten Fachkräften stetig. Um dieser Anforderung gerecht zu werden, hat das Unternehmen NT-MDT (Zelenograd, Russland) ein spezialisiertes Bildungs- und Wissenschaftslabor für Rastersondenmikroskopie entwickelt NanoEducator.
SPM NanoEducator speziell für die Laborarbeit von Studierenden konzipiert. Dieses Gerät richtet sich an das studentische Publikum: Es wird vollständig über einen Computer gesteuert, verfügt über eine einfache und intuitive Benutzeroberfläche, Animationsunterstützung, erfordert eine schrittweise Entwicklung von Techniken, das Fehlen komplexer Einstellungen und kostengünstiger Verbrauchsmaterialien.
In dieser Laborarbeit lernen Sie etwas über die Rastersondenmikroskopie, machen sich mit ihren Grundlagen vertraut und studieren den Aufbau und die Funktionsweise des Lehrgeräts SPM NanoEducator Lernen Sie, biologische Präparate für die Forschung vorzubereiten, erstellen Sie Ihr erstes SPM-Bild eines Komplexes von Milchsäurebakterien und erlernen Sie die Grundlagen der Verarbeitung und Präsentation von Messergebnissen.
7.2.Informationen für den Lehrer 1
Die Laborarbeit erfolgt in mehreren Schritten:
1. Die Probenvorbereitung wird von jedem Studierenden individuell durchgeführt.
2. Das erste Bild wird auf einem Gerät unter Aufsicht eines Lehrers aufgenommen, dann untersucht jeder Schüler seine Probe selbstständig.
3. Experimentelle Daten werden von jedem Studierenden individuell bearbeitet.
Forschungsprobe: Milchsäurebakterien auf einem Deckglas.
Vor Beginn der Arbeiten ist es notwendig, eine Sonde mit der charakteristischsten Amplituden-Frequenz-Charakteristik (einzelnes symmetrisches Maximum) auszuwählen und ein Bild der Oberfläche der untersuchten Probe zu erhalten.
Der Laborbericht sollte Folgendes enthalten:
1. Theorieteil (Antworten auf Kontrollfragen).
2. Ergebnisse des experimentellen Teils (Beschreibung der durchgeführten Forschung, der erzielten Ergebnisse und der gezogenen Schlussfolgerungen).
1. Methoden zur Untersuchung der Morphologie biologischer Objekte.
2. Rastersondenmikroskop:
SPM-Design;
Arten von SPM: STM, AFM;
SPM-Datenformat, Visualisierung von SPM-Daten.
3. Probenvorbereitung für SPM-Studien:
Morphologie und Struktur von Bakterienzellen;
Vorbereitung von Vorbereitungen für das Studium der Morphologie mit SPM.
4. Einführung in das Design- und Steuerungsprogramm des NanoEducator SPM.
5. Erhalten eines SPM-Images.
6. Verarbeitung und Analyse der erhaltenen Bilder. Quantitative Charakterisierung von SPM-Bildern.
Methoden zur Untersuchung der Morphologie biologischer Objekte
Der charakteristische Durchmesser von Zellen beträgt 10 20 μm, Bakterien von 0,5 bis 3 5 μm, diese Werte sind fünfmal kleiner als das kleinste mit bloßem Auge sichtbare Partikel. Daher wurde die erste Untersuchung von Zellen erst nach dem Aufkommen optischer Mikroskope möglich. Ende des 17. Jahrhunderts. Antonio van Leeuwenhoek baute das erste optische Mikroskop; davor ahnten die Menschen nicht einmal die Existenz pathogener Mikroben und Bakterien [Lit. 7 -1].
Optische Mikroskopie
Die Schwierigkeiten bei der Untersuchung von Zellen liegen darin begründet, dass sie farblos und transparent sind, sodass die Entdeckung ihrer Grundstrukturen erst nach der Einführung von Farbstoffen in die Praxis erfolgte. Die Farbstoffe sorgten für ausreichenden Bildkontrast. Mit einem optischen Mikroskop können Sie Objekte unterscheiden, die 0,2 µm voneinander entfernt sind, d. h. Die kleinsten Objekte, die im Lichtmikroskop noch unterschieden werden können, sind Bakterien und Mitochondrien. Bilder kleinerer Zellelemente werden durch Effekte verzerrt, die durch die Wellennatur des Lichts verursacht werden.
Zur Herstellung langlebiger Präparate werden Zellen mit einem Fixiermittel behandelt, um sie zu immobilisieren und zu konservieren. Darüber hinaus erhöht die Fixierung die Zugänglichkeit der Zellen für Farbstoffe, weil Zellmakromoleküle werden durch Vernetzungen zusammengehalten, wodurch sie stabilisiert und in einer bestimmten Position fixiert werden. Am häufigsten wirken Aldehyde und Alkohole als Fixiermittel (z. B. bilden Glutaraldehyd oder Formaldehyd kovalente Bindungen mit freien Aminogruppen von Proteinen und vernetzen benachbarte Moleküle). Sobald das Gewebe fixiert ist, wird es normalerweise mit einem Mikrotom in sehr dünne Schnitte (1 bis 10 µm dick) geschnitten, die dann auf einen Objektträger aus Glas gelegt werden. Diese Zubereitungsmethode kann die Struktur von Zellen oder Makromolekülen schädigen, daher ist schnelles Einfrieren die bevorzugte Methode. Gefrorenes Gewebe wird mit einem Mikrotom geschnitten, das in einer Kältekammer installiert ist. Nach der Vorbereitung der Schnitte werden die Zellen gefärbt. Zu diesem Zweck werden hauptsächlich organische Farbstoffe (Malachitgrün, schwarzer Sudan usw.) verwendet. Jeder von ihnen zeichnet sich durch eine gewisse Affinität zu zellulären Bestandteilen aus, beispielsweise hat Hämatoxylin eine Affinität zu negativ geladenen Molekülen und ermöglicht daher den Nachweis von DNA in Zellen. Wenn ein bestimmtes Molekül in einer Zelle in geringen Mengen vorhanden ist, ist es am bequemsten, die Fluoreszenzmikroskopie zu verwenden.
Fluoreszenzmikroskopie
Fluoreszierende Farbstoffe absorbieren Licht einer Wellenlänge und emittieren Licht einer anderen, längeren Wellenlänge. Wird ein solcher Stoff mit Licht bestrahlt, dessen Wellenlänge mit der Wellenlänge des vom Farbstoff absorbierten Lichts übereinstimmt, und anschließend zur Analyse ein Filter verwendet, der Licht mit einer Wellenlänge durchlässt, die dem vom Farbstoff emittierten Licht entspricht, kann das fluoreszierende Molekül nachgewiesen werden durch Leuchten im Dunkelfeld. Charakteristisch für solche Moleküle ist die hohe Intensität des emittierten Lichts. Die Verwendung von Fluoreszenzfarbstoffen zum Färben von Zellen erfordert den Einsatz eines speziellen Fluoreszenzmikroskops. Dieses Mikroskop ähnelt einem herkömmlichen optischen Mikroskop, aber das Licht eines leistungsstarken Illuminators durchläuft zwei Filtersätze – einen, um einen Teil der Strahlung des Illuminators zu stoppen vor der Probe und die andere dient dazu, das von der Probe empfangene Licht zu filtern. Der erste Filter ist so ausgewählt, dass er nur Licht der Wellenlänge durchlässt, die einen bestimmten Fluoreszenzfarbstoff anregt; Gleichzeitig blockiert ein zweiter Filter dieses einfallende Licht und lässt Licht der Wellenlänge durch, die der Farbstoff bei seiner Fluoreszenz aussendet.
Fluoreszenzmikroskopie wird häufig verwendet, um bestimmte Proteine oder andere Moleküle zu identifizieren, die nach kovalenter Bindung an Fluoreszenzfarbstoffe fluoreszieren. Zu diesem Zweck werden üblicherweise zwei Farbstoffe verwendet - Fluorescein, das bei Anregung mit hellblauem Licht eine intensive gelbgrüne Fluoreszenz erzeugt, und Rhodamin, verursacht nach Anregung mit gelbgrünem Licht dunkelrote Fluoreszenz. Durch die Verwendung von Fluorescein und Rhodamin zum Färben ist es möglich, die Verteilung verschiedener Moleküle zu erhalten.
Dunkelfeldmikroskopie
Der einfachste Weg, die Details der Struktur einer Zelle zu erkennen, besteht darin, das von den verschiedenen Komponenten der Zelle gestreute Licht zu beobachten. Bei einem Dunkelfeldmikroskop werden die Strahlen der Beleuchtung von der Seite geleitet und nur Streustrahlen gelangen in das Mikroskopobjektiv. Dementsprechend sieht die Zelle wie ein beleuchtetes Objekt auf einem dunklen Feld aus. Einer der Hauptvorteile der Dunkelfeldmikroskopie ist die Möglichkeit, die Bewegung von Zellen während des Teilungs- und Migrationsprozesses zu beobachten. Zellbewegungen sind typischerweise sehr langsam und schwer in Echtzeit zu beobachten. In diesem Fall kommt eine bildweise (Zeitraffer-)Mikrofilm- oder Videoaufzeichnung zum Einsatz. Aufeinanderfolgende Bilder sind zeitlich getrennt, aber wenn die Aufnahme mit normaler Geschwindigkeit abgespielt wird, wird das Bild realer Ereignisse beschleunigt.
In den letzten Jahren haben Videokameras und damit verbundene Bildverarbeitungstechnologien die Möglichkeiten der optischen Mikroskopie erheblich erweitert. Dank ihres Einsatzes konnten die durch die Besonderheiten der menschlichen Physiologie verursachten Schwierigkeiten überwunden werden. Das sind sie:
1. Das Auge registriert unter normalen Bedingungen kein sehr schwaches Licht.
2. Das Auge ist nicht in der Lage, kleine Unterschiede in der Lichtintensität vor einem hellen Hintergrund zu erkennen.
Das erste dieser Probleme wurde überwunden, nachdem dem Mikroskop ultrahochempfindliche Videokameras hinzugefügt wurden. Dadurch war es möglich, Zellen über längere Zeiträume bei schlechten Lichtverhältnissen zu beobachten, wodurch eine längere Exposition gegenüber hellem Licht entfällt. Bildgebende Systeme sind besonders wichtig für die Untersuchung fluoreszierender Moleküle in lebenden Zellen. Da das Bild von der Videokamera in Form elektronischer Signale erzeugt wird, kann es entsprechend in numerische Signale umgewandelt, an einen Computer gesendet und dann weiterverarbeitet werden, um verborgene Informationen zu extrahieren.
Der mit der Computer-Interferenzmikroskopie erreichbare hohe Kontrast ermöglicht die Beobachtung auch sehr kleiner Objekte, etwa einzelner Mikrotubuli, deren Durchmesser weniger als ein Zehntel der Lichtwellenlänge (0,025 μm) beträgt. Einzelne Mikrotubuli lassen sich auch mittels Fluoreszenzmikroskopie erkennen. In beiden Fällen sind jedoch Beugungseffekte unvermeidlich, die das Bild stark verändern. In diesem Fall wird der Durchmesser der Mikrotubuli überschätzt (0,2 μm), was es unmöglich macht, einzelne Mikrotubuli von einem Bündel mehrerer Mikrotubuli zu unterscheiden. Um dieses Problem zu lösen, wird ein Elektronenmikroskop benötigt, dessen Auflösungsgrenze weit über die Wellenlänge des sichtbaren Lichts hinaus verschoben ist.
Elektronenmikroskopie
Der Zusammenhang zwischen Wellenlänge und Auflösungsgrenze gilt auch für Elektronen. Bei einem Elektronenmikroskop liegt die Auflösungsgrenze jedoch deutlich niedriger als die Beugungsgrenze. Die Wellenlänge eines Elektrons nimmt mit zunehmender Geschwindigkeit ab. In einem Elektronenmikroskop mit einer Spannung von 100.000 V beträgt die Elektronenwellenlänge 0,004 nm. Die Auflösung eines solchen Mikroskops beträgt theoretisch 0,002 nm. Aufgrund der kleinen numerischen Apertur von Elektronenlinsen beträgt die Auflösung moderner Elektronenmikroskope jedoch in der Realität bestenfalls 0,1 nm. Schwierigkeiten bei der Probenvorbereitung und Strahlenschäden verringern die normale Auflösung erheblich, die bei biologischen Objekten bei 2 nm liegt (etwa 100-mal höher als die eines Lichtmikroskops).
Die Elektronenquelle in Transmissionselektronenmikroskop (TEM) ist ein Kathodenfaden, der sich an der Spitze einer etwa zwei Meter hohen zylindrischen Säule befindet. Um eine Elektronenstreuung beim Zusammenstoß mit Luftmolekülen zu vermeiden, wird in der Säule ein Vakuum erzeugt. Vom Kathodenfaden emittierte Elektronen werden von einer nahegelegenen Anode beschleunigt und passieren ein kleines Loch, wodurch ein Elektronenstrahl entsteht, der zum Boden der Säule wandert. Entlang der Säule befinden sich in einiger Entfernung Ringmagnete, die den Elektronenstrahl fokussieren, ähnlich wie Glaslinsen, die einen Lichtstrahl in einem optischen Mikroskop fokussieren. Die Probe wird durch eine Luftschleuse im Weg des Elektronenstrahls in die Säule eingebracht. Ein Teil der Elektronen wird im Moment des Durchgangs durch die Probe entsprechend der Dichte der Substanz in diesem Bereich gestreut, der Rest der Elektronen wird fokussiert und bildet ein Bild (ähnlich der Bildentstehung in einem optischen Mikroskop). auf einer Fotoplatte oder auf einem phosphoreszierenden Schirm.
Einer der größten Nachteile der Elektronenmikroskopie besteht darin, dass biologische Proben einer speziellen Bearbeitung unterzogen werden müssen. Zunächst werden sie zunächst mit Glutaraldehyd und dann mit Osminsäure fixiert, die die Doppelschicht aus Lipiden und Proteinen bindet und stabilisiert. Zweitens haben Elektronen eine geringe Durchschlagskraft, sodass ultradünne Schnitte angefertigt werden müssen. Dazu werden die Proben entwässert und mit Harzen imprägniert. Drittens werden die Proben zur Kontraststeigerung mit Schwermetallsalzen wie Osmium, Uran und Blei behandelt.
Um ein dreidimensionales Bild der Oberfläche zu erhalten, wird es verwendet Rasterelektronenmikroskop (REM) Dabei werden Elektronen verwendet, die von der Oberfläche der Probe gestreut oder emittiert werden. Dabei wird die Probe fixiert, getrocknet und mit einem dünnen Schwermetallfilm überzogen und dann mit einem schmalen Elektronenstrahl abgetastet. Dabei wird die Anzahl der bei der Bestrahlung der Oberfläche gestreuten Elektronen abgeschätzt. Der erhaltene Wert wird zur Steuerung der Intensität des zweiten Strahls verwendet, der sich synchron mit dem ersten bewegt und ein Bild auf dem Monitorbildschirm erzeugt. Die Auflösung der Methode beträgt etwa 10 nm und ist nicht für die Untersuchung intrazellulärer Organellen geeignet. Die Dicke der mit dieser Methode untersuchten Proben wird durch die Durchdringungsfähigkeit der Elektronen bzw. deren Energie bestimmt.
Die wesentlichen und wesentlichen Nachteile all dieser Methoden sind die Dauer, Komplexität und die hohen Kosten der Probenvorbereitung.
Rastersondenmikroskopie
Bei einem Rastersondenmikroskop (SPM) wird anstelle eines Elektronenstrahls oder optischer Strahlung eine scharfe Sonde, eine Nadel, verwendet, um die Oberfläche der Probe abzutasten. Im übertragenen Sinne können wir sagen: Wenn eine Probe in einem optischen oder Elektronenmikroskop untersucht wird, dann ist sie in einem SPM zu spüren. Dadurch ist es möglich, dreidimensionale Bilder von Objekten in verschiedenen Medien zu erhalten: Vakuum, Luft, Flüssigkeit.
Spezielle, für die biologische Forschung angepasste SPM-Designs ermöglichen die gleichzeitige optische Beobachtung, um sowohl lebende Zellen in verschiedenen flüssigen Medien als auch fixierte Präparate in Luft zu scannen.
Rastersondenmikroskop
Der Name eines Rastersondenmikroskops spiegelt das Funktionsprinzip wider – das Scannen der Oberfläche einer Probe, bei dem punktuell der Grad der Wechselwirkung der Sonde mit der Oberfläche abgelesen wird. Die Größe des Scanbereichs und die Anzahl der Punkte darin N X ·N Y können angegeben werden. Je mehr Punkte angegeben werden, desto höher ist die Auflösung des Oberflächenbildes. Der Abstand zwischen den Signallesepunkten wird als Abtastabstand bezeichnet. Der Scanschritt sollte kleiner sein als die zu untersuchenden Oberflächendetails. Die Sonde bewegt sich während des Scanvorgangs (siehe Abb. 7-1) linear in Vorwärts- und Rückwärtsrichtung (in schneller Scanrichtung), der Übergang zur nächsten Zeile erfolgt in senkrechter Richtung (in langsamer Scanrichtung). .
Reis. 7 1. Schematische Darstellung des Scanvorgangs
(Das Signal wird während des Vorwärtshubs des Scanners gelesen)
Abhängig von der Art des zu lesenden Signals haben Rastermikroskope unterschiedliche Namen und Zwecke:
Beim Rasterkraftmikroskop (AFM) werden die Kräfte der interatomaren Wechselwirkung zwischen den Sondenatomen und den Probenatomen abgelesen;
Tunnelmikroskop (STM), misst den Tunnelstrom, der zwischen der leitenden Probe und der leitenden Sonde fließt;
Beim Magnetkraftmikroskop (MFM) werden die Wechselwirkungskräfte zwischen einer mit magnetischem Material beschichteten Sonde und einer Probe, die magnetische Eigenschaften erfasst, abgelesen;
Mit einem elektrostatischen Kraftmikroskop (ESM) kann man sich ein Bild von der Verteilung des elektrischen Potentials auf der Oberfläche einer Probe machen. Es werden Sonden verwendet, deren Spitze mit einem dünnen leitfähigen Film (Gold oder Platin) beschichtet ist.
SPM-Design
Das SPM besteht aus den folgenden Hauptkomponenten (Abb. 7-2): einer Sonde, piezoelektrischen Aktoren, um die Sonde in X, Y, Z über die Oberfläche der zu untersuchenden Probe zu bewegen, einem Rückkopplungsschaltkreis und einem Computer zur Steuerung des Scannens Prozess und Bildaufnahme.

Abbildung 7 2. Schema eines Rastersondenmikroskops
Sondensensor – eine Komponente eines Kraftsondenmikroskops, die die Probe abtastet. Der Sondensensor enthält einen Ausleger (Federkonsole) vom rechteckigen (I-förmigen) oder dreieckigen (V-förmigen) Typ (Abb. 7 -3), an dessen Ende sich eine spitze Sonde befindet (Abb. 7 -3). , meist konisch oder pyramidenförmig . Das andere Ende des Cantilevers ist mit dem Substrat (mit dem sogenannten Chip) verbunden. Sondensensoren bestehen aus Silizium oder Siliziumnitrid. Das Hauptmerkmal eines Auslegers ist die Kraftkonstante (Steifigkeitskonstante), sie variiert von 0,01 N/m bis 1020 N/m. Zur Untersuchung biologischer Objekte werden „weiche“ Sonden mit einer Härte von 0,01 0,06 N/m verwendet.


Reis. 7 3. Bilder von Pyramiden-AFM-Sondensensoren
erhalten mit einem Elektronenmikroskop:
a – I-förmiger Typ, b – V-förmiger Typ, c – Pyramide an der Spitze des Auslegers
Piezoelektrische Aktoren oder Scanner – zur kontrollierten Bewegung der Sonde über die Probe oder der Probe selbst relativ zur Sonde auf ultrakurzen Distanzen. Piezoelektrische Aktoren verwenden piezokeramische Materialien, deren Größe sich ändert, wenn an sie elektrische Spannung angelegt wird. Der Vorgang der Veränderung geometrischer Parameter unter dem Einfluss eines elektrischen Feldes wird als inverser piezoelektrischer Effekt bezeichnet. Das am häufigsten verwendete Piezomaterial ist Bleizirkonat-Titanat.
Der Scanner ist eine piezokeramische Struktur, die eine Bewegung entlang dreier Koordinaten ermöglicht: x, y (in der lateralen Ebene der Probe) und z (vertikal). Es gibt verschiedene Arten von Scannern, die gebräuchlichsten sind Stativ- und Röhrenscanner (Abbildung 7-4).

Reis. 7 4. Scannerausführungen: a) – Stativ, b) – Rohr
Bei einem Stativscanner werden Bewegungen entlang dreier Koordinaten durch drei unabhängige piezokeramische Stäbe gewährleistet, die eine orthogonale Struktur bilden.
In einem Röhrenscanner biegt sich ein hohles piezoelektrisches Rohr in der XZ- und ZY-Ebene und dehnt sich entlang der Z-Achse aus oder zusammen, wenn entsprechende Spannungen an die Elektroden angelegt werden, die die Bewegungen des Rohrs steuern. Elektroden zur Steuerung der Bewegung in der XY-Ebene befinden sich auf der Außenfläche des Rohrs; zur Steuerung der Bewegung in Z werden an die X- und Y-Elektroden gleiche Spannungen angelegt.
Rückkopplungsschaltung – eine Reihe von SPM-Elementen, mit deren Hilfe die Sonde während des Scannens in einem festen Abstand von der Probenoberfläche gehalten wird (Abb. 7-5). Während des Scanvorgangs kann sich die Sonde auf Bereichen der Probenoberfläche mit unterschiedlicher Topographie befinden. In diesem Fall ändert sich der Sonden-Proben-Abstand Z und die Stärke der Wechselwirkung zwischen Spitze und Probe ändert sich entsprechend.

Reis. 7 5. Rückkopplungsschaltung des Rastersondenmikroskops
Wenn sich die Sonde der Oberfläche nähert, nehmen die Wechselwirkungskräfte zwischen Sonde und Probe zu und auch das Signal vom Aufzeichnungsgerät nimmt zu V(T), welche ausgedrückt in Spannungseinheiten. Der Komparator vergleicht das Signal V(T) mit Referenzspannung V unterstützend und erzeugt ein Korrektursignal V Korrespondent. Korrektursignal V Korrespondent wird dem Scanner zugeführt und die Sonde aus der Probe zurückgezogen. Die Referenzspannung ist die Spannung, die dem Signal des Aufzeichnungsgeräts entspricht, wenn sich die Sonde in einem bestimmten Abstand von der Probe befindet. Durch die Aufrechterhaltung dieses spezifizierten Abstands zwischen Sonde und Probe während des Scannens behält das Rückkopplungssystem die spezifizierte Interaktionskraft zwischen Sonde und Probe bei.

Reis. 7 6. Trajektorie der relativen Bewegung der Sonde während des Prozesses der Aufrechterhaltung einer konstanten Kraft der Wechselwirkung zwischen Spitze und Probe durch das Rückkopplungssystem
In Abb. 7 – 6 zeigt die Flugbahn der Sonde relativ zur Probe unter Beibehaltung einer konstanten Sonde-Probe-Wechselwirkungskraft. Befindet sich die Sonde über der Grube, wird eine Spannung an den Scanner angelegt, die dazu führt, dass der Scanner ausfährt und die Sonde absenkt.
Die Reaktionsgeschwindigkeit des Rückkopplungskreises auf eine Änderung des Abstands zwischen Sonde und Probe (Wechselwirkung zwischen Sonde und Probe) wird durch die Konstante des Rückkopplungskreises bestimmt K. Werte K hängen von den Konstruktionsmerkmalen eines bestimmten SPM (Design und Eigenschaften des Scanners, Elektronik), der Betriebsart des SPM (Größe des Scanbereichs, Scangeschwindigkeit usw.) sowie den Eigenschaften der untersuchten Oberfläche ab (Maßstab der Reliefmerkmale, Härte des Materials usw.).
Arten von SPM
Rastertunnelmikroskop
Beim STM misst das Aufzeichnungsgerät (Abb. 7-7) den zwischen der Metallsonde fließenden Tunnelstrom, der je nach Potential auf der Oberfläche der Probe und der Topographie ihrer Oberfläche variiert. Die Sonde ist eine scharf geschärfte Nadel, der Krümmungsradius der Spitze kann mehrere Nanometer erreichen. Als Sondenmaterialien werden üblicherweise Metalle mit hoher Härte und chemischer Beständigkeit verwendet: Wolfram oder Platin.

Reis. 7 7. Schema eines Tunnelsondensensors
Zwischen der leitfähigen Sonde und der leitfähigen Probe wird eine Spannung angelegt. Wenn die Spitze der Sonde etwa 10 A von der Probe entfernt ist, beginnen Elektronen aus der Probe, je nach Vorzeichen der Spannung, durch den Spalt in die Sonde zu tunneln oder umgekehrt (Abb. 7 - 8).

Reis. 7 8. Schematische Darstellung der Wechselwirkung der Sondenspitze mit der Probe
Der resultierende Tunnelstrom wird von einem Aufzeichnungsgerät gemessen. Seine Größe ICH T proportional zur am Tunnelkontakt anliegenden Spannung V und hängt exponentiell vom Abstand der Nadel zur Probe ab D.
Dadurch ergeben sich kleine Änderungen im Abstand von der Sondenspitze zur Probe D entsprechen exponentiell großen Änderungen im Tunnelstrom ICH T(Spannung vorausgesetzt V konstant gehalten). Aus diesem Grund reicht die Empfindlichkeit des Tunnelsondensensors aus, um Höhenänderungen von weniger als 0,1 nm zu erfassen und somit ein Bild von Atomen auf der Oberfläche eines Festkörpers zu erhalten.
Rasterkraftmikroskop
Der gebräuchlichste Sondensensor für die Wechselwirkung atomarer Kräfte ist ein Federausleger (vom englischen Cantilever – Konsole) mit einer Sonde an seinem Ende. Das Ausmaß der Biegung des Auslegers, die aus der Kraftwechselwirkung zwischen der Probe und der Sonde resultiert (Abbildung 7-9), wird mithilfe einer optischen Aufzeichnungsschaltung gemessen.
Das Funktionsprinzip des Kraftsensors basiert auf der Nutzung atomarer Kräfte, die zwischen den Sondenatomen und den Probenatomen wirken. Wenn sich die Kraft zwischen Sonde und Probe ändert, ändert sich das Ausmaß der Biegung des Auslegers, und diese Änderung wird vom optischen Aufzeichnungssystem gemessen. Somit ist ein Atomkraftsensor eine scharfkantige Sonde mit hoher Empfindlichkeit, die es ermöglicht, die Wechselwirkungskräfte zwischen einzelnen Atomen zu erfassen.
Bei kleinen Biegungen das Verhältnis zwischen der Kraft zwischen Sonde und Probe F und Durchbiegung der Cantilever-Spitze X wird durch das Hookesche Gesetz bestimmt:
Wo k – Kraftkonstante (Steifigkeitskonstante) des Cantilevers.
Wenn beispielsweise ein Cantilever mit einer Konstante verwendet wird k In der Größenordnung von 1 n/m beträgt die Größe der Auslenkung des Auslegers unter der Wirkung einer Wechselwirkungskraft zwischen Spitze und Probe in der Größenordnung von 0,1 Nanonewton etwa 0,1 nm.
Um solch kleine Bewegungen zu messen, wird üblicherweise ein optischer Wegsensor (Abbildung 7-9), bestehend aus einem Halbleiterlaser und einer vierteiligen Fotodiode, verwendet. Wenn der Ausleger gebogen wird, bewegt sich der von ihm reflektierte Laserstrahl relativ zur Mitte des Fotodetektors. Somit kann die Biegung des Auslegers durch die relative Änderung der Beleuchtung der oberen (T) und unteren (B) Hälfte des Fotodetektors bestimmt werden.

Abbildung 7 9. Diagramm des Leistungssensors
Abhängigkeit der Wechselwirkungskräfte zwischen Sonde und Probe vom Abstand zwischen Sonde und Probe
Wenn sich die Sonde der Probe nähert, wird sie aufgrund der vorhandenen Anziehungskräfte (Van-der-Waals-Kräfte) zunächst von der Oberfläche angezogen. Je weiter sich die Sonde der Probe nähert, desto mehr beginnen sich die Elektronenhüllen der Atome am Ende der Sonde und die Atome auf der Oberfläche der Probe zu überlappen, was zum Auftreten einer abstoßenden Kraft führt. Wenn der Abstand weiter abnimmt, wird die abstoßende Kraft dominant.
Im Allgemeinen ist die Abhängigkeit von der Stärke der interatomaren Wechselwirkung Füber den Abstand zwischen Atomen R hat die Form:
 .
.
Konstanten A Und B und Exponenten M Und N hängen von der Art der Atome und der Art der chemischen Bindungen ab. Für Van-der-Waals-Streitkräfte M=7 und n=3. Qualitativ ist die Abhängigkeit F(R) in Abb. dargestellt. 7 -10.

Reis. 7 10. Abhängigkeit der Wechselwirkungskraft zwischen Atomen vom Abstand
SPM-Datenformat, Visualisierung von SPM-Daten
Daten zur Oberflächenmorphologie, die bei der Untersuchung mit einem optischen Mikroskop gewonnen wurden, werden in Form eines vergrößerten Bildes eines Oberflächenbereichs dargestellt. Die mit dem SPM erhaltenen Informationen werden in Form eines zweidimensionalen Arrays von ganzen Zahlen A ij geschrieben. Jeder Wert ij entspricht einem bestimmten Oberflächenpunkt innerhalb des Scanfeldes. Die grafische Darstellung dieser Zahlenreihe wird als SPM-gescanntes Bild bezeichnet.
Gescannte Bilder können entweder zweidimensional (2D) oder dreidimensional (3D) sein. Bei der 2D-Visualisierung ist jeder Oberflächenpunkt Z= F(x,y) wird entsprechend der Höhe des Oberflächenpunktes ein bestimmter Farbton zugeordnet (Abb. 7 -11 a). Bei 3D-Visualisierung Oberflächenbild Z= F(x,y) wird in einer axonometrischen Perspektive mithilfe einer bestimmten Art berechneter Pixel oder Relieflinien konstruiert. Der effektivste Weg, 3D-Bilder einzufärben, besteht darin, die Bedingungen der Oberflächenbeleuchtung mit einer Punktquelle zu simulieren, die sich an einem bestimmten Punkt im Raum über der Oberfläche befindet (Abb. 7 -11 b). Gleichzeitig ist es möglich, einzelne kleine Reliefmerkmale hervorzuheben.
|
|


Reis. 7 11. Menschliche Blutlymphozyten:
a) 2D-Bild, b) 3D-Bild mit Seitenbeleuchtung
Vorbereitung von Proben für die SPM-Untersuchung
Morphologie und Struktur von Bakterienzellen
Bakterien sind einzellige Mikroorganismen mit vielfältiger Form und komplexer Struktur, die die Vielfalt ihrer funktionellen Aktivitäten bestimmt. Bakterien zeichnen sich durch vier Hauptformen aus: kugelförmig (kugelförmig), zylindrisch (stabförmig), gewunden und fadenförmig [Ref. 7 -2].
Kokken (kugelförmige Bakterien) - je nach Teilungsebene und Lage der einzelnen Individuen werden sie in Mikrokokken (getrennte Kokken), Diplokokken (gepaarte Kokken), Streptokokken (Ketten von Kokken), Staphylokokken (traubenförmig), Tetrakokken ( Formationen aus vier Kokken) und Sarcina (Päckchen mit 8 oder 16 Kokken).
Stabförmig – Bakterien kommen in Form von Einzelzellen, Diplo- oder Streptobakterien vor.
Verdrehte - Vibrios, Spirilla und Spirochäten. Vibrios haben das Aussehen leicht gebogener Stäbchen, Spirillen haben eine gewundene Form mit mehreren Spirallocken.
Die Größe der Bakterien liegt zwischen 0,1 und 10 Mikrometern. Die Zusammensetzung einer Bakterienzelle umfasst eine Kapsel, eine Zellwand, eine Zytoplasmamembran und ein Zytoplasma. Das Zytoplasma enthält Nukleotide, Ribosomen und Einschlüsse. Einige Bakterien sind mit Geißeln und Zotten ausgestattet. Eine Reihe von Bakterien bilden Sporen. Die Sporen überschreiten die ursprüngliche Quergröße der Zelle und verleihen ihr eine spindelförmige Form.
Um die Morphologie von Bakterien im Lichtmikroskop zu untersuchen, werden daraus native (intravitale) Präparate oder mit Anilinfarbstoff gefärbte Fixausstriche hergestellt. Zur Identifizierung von Flagellen, Zellwänden, Nukleotiden und verschiedenen zytoplasmatischen Einschlüssen gibt es spezielle Färbemethoden.
Die SPM-Untersuchung der Morphologie von Bakterienzellen erfordert keine Färbung des Präparats. SPM ermöglicht die Bestimmung der Form und Größe von Bakterien mit hoher Auflösung. Bei sorgfältiger Vorbereitung des Arzneimittels und der Verwendung einer Sonde mit kleinem Krümmungsradius ist es möglich, Flagellen zu identifizieren. Gleichzeitig ist es aufgrund der großen Starrheit der Bakterienzellwand unmöglich, intrazelluläre Strukturen zu „untersuchen“, wie dies bei einigen tierischen Zellen der Fall ist.
Vorbereitung von Vorbereitungen für die SPM-Untersuchung der Morphologie
Für die ersten Erfahrungen mit SPM empfiehlt es sich, ein biologisches Präparat zu wählen, das keine aufwendige Vorbereitung erfordert. Gut geeignet sind leicht zugängliche und apathogene Milchsäurebakterien aus Sauerkrautlake oder fermentierten Milchprodukten.
Für die SPM-Forschung in Luft ist es notwendig, das Untersuchungsobjekt fest auf der Oberfläche des Substrats, beispielsweise auf einem Deckglas, zu fixieren. Darüber hinaus sollte die Bakteriendichte in der Suspension so sein, dass die Zellen bei der Ablagerung auf dem Substrat nicht zusammenkleben, und der Abstand zwischen ihnen sollte nicht zu groß sein, damit beim Scannen mehrere Objekte in einem Bild aufgenommen werden können . Diese Bedingungen sind erfüllt, wenn der Probenvorbereitungsmodus richtig gewählt ist. Wenn Sie einen Tropfen einer bakterienhaltigen Lösung auf ein Substrat auftragen, kommt es zu deren allmählicher Ablagerung und Anhaftung. Als Hauptparameter sollten die Konzentration der Zellen in der Lösung und die Sedimentationszeit berücksichtigt werden. Die Konzentration der Bakterien in der Suspension wird mithilfe eines optischen Trübungsstandards bestimmt.
In unserem Fall spielt nur ein Parameter eine Rolle – die Inkubationszeit. Je länger der Tropfen auf dem Glas verbleibt, desto höher ist die Dichte der Bakterienzellen. Beginnt gleichzeitig ein Flüssigkeitstropfen auszutrocknen, wird das Präparat durch die ausgefallenen Bestandteile der Lösung zu stark verunreinigt. Ein Tropfen einer bakterienzellenhaltigen Lösung (Sole) wird auf ein Deckglas aufgetragen und 5-60 Minuten (je nach Zusammensetzung der Lösung) belassen. Anschließend, ohne auf das Trocknen des Tropfens zu warten, gründlich mit destilliertem Wasser abspülen (das Präparat mehrmals mit einer Pinzette in ein Glas tauchen). Nach dem Trocknen ist das Präparat bereit für die Messung mit einem SPM.
Als Beispiel haben wir aus Sauerkrautlake Präparate aus Milchsäurebakterien hergestellt. Die Haltezeit eines Tropfens Sole auf dem Deckglas wurde mit 5 Minuten, 20 Minuten und 1 Stunde gewählt (der Tropfen hatte bereits begonnen auszutrocknen). SPM-Frames sind in Abb. dargestellt. 7 -12, Abb. 7 -13,
Reis. 7 -14.
Aus den Abbildungen geht hervor, dass für diese Lösung die optimale Inkubationszeit 510 Minuten beträgt. Eine längere Verweildauer des Tropfens auf der Oberfläche des Substrats führt zur Adhäsion von Bakterienzellen. Wenn ein Tropfen der Lösung auszutrocknen beginnt, lagern sich Bestandteile der Lösung auf dem Glas ab und können nicht abgewaschen werden.

Reis. 7 12. Bilder von Milchsäurebakterien auf einem Deckglas,
erhalten mit SPM.

Reis. 7 13. Bilder von Milchsäurebakterien auf einem Deckglas,
erhalten mit SPM. Inkubationszeit der Lösung 20 Min

Reis. 7 14. Bilder von Milchsäurebakterien auf einem Deckglas,
erhalten mit SPM. Inkubationszeit der Lösung 1 Stunde
Anhand eines der ausgewählten Präparate (Abb. 7-12) haben wir versucht zu überlegen, was Milchsäurebakterien sind und welche Form für sie in diesem Fall typisch ist. (Abb. 7 -15)

Reis. 7 15. AFM-Bild von Milchsäurebakterien auf einem Deckglas.
Inkubationszeit der Lösung 5 Min

Reis. 7 16. AFM-Bild einer Kette von Milchsäurebakterien auf einem Deckglas.
Inkubationszeit der Lösung 5 Min
Charakteristisch für Sole ist, dass die Bakterien stäbchenförmig und in einer Kette angeordnet sind.

Reis. 7 17. Fenster des Steuerungsprogramms für den pädagogischen SPM NanoEducator.
Symbolleiste
Mithilfe der Tools des pädagogischen SPM-Programms NanoEducator haben wir die Größe von Bakterienzellen bestimmt. Sie lagen im Bereich von etwa 0,5 × 1,6 µm
bis zu 0,8 × 3,5 µm.
Die erhaltenen Ergebnisse werden mit den Daten verglichen, die in Bergeys Bakteriendeterminante [Lit. 7 -3].
Milchsäurebakterien werden als Laktobazillen (Lactobacillus) klassifiziert. Die Zellen haben das Aussehen von Stäbchen, meist von regelmäßiger Form. Die Stäbchen sind lang, manchmal fast kokkenförmig, meist in kurzen Ketten. Abmessungen 0,5 - 1,2 x 1,0 - 10 Mikrometer. Sie bilden keinen Streit; in seltenen Fällen sind sie aufgrund peritrichialer Flagellen beweglich. In der Umwelt weit verbreitet, besonders häufig in Lebensmitteln tierischen und pflanzlichen Ursprungs. Milchsäurebakterien gehören zur normalen Mikroflora des Verdauungstraktes. Jeder weiß, dass Sauerkraut nicht nur Vitamine enthält, sondern auch zur Verbesserung der Darmflora beiträgt.
Entwurf eines Rastersondenmikroskops NanoEducator
In Abb. 7 -18 zeigt das Aussehen des Messkopfes SPM NanoEducator und die Hauptelemente des Geräts, die während des Betriebs verwendet werden, werden angegeben.

Reis. 7 18. Aussehen des NanoEducator SPM-Messkopfes
1- Basis, 2- Probenhalter, 3- Interaktionssensor, 4- Sensorbefestigungsschraube,
5-Schraube für manuelle Eingabe, 6-Schraube zum Bewegen des Scanners mit der Probe in der horizontalen Ebene, 7-Schutzabdeckung mit Videokamera
In Abb. 7 -19 zeigt den Aufbau des Messkopfes. Auf der Basis 1 befindet sich ein Scanner 8 mit einem Probenhalter 7 und einem Mechanismus zur Zuführung der Probe zur Sonde 2 auf Basis eines Schrittmotors. Im Bildungsbereich SPM NanoEducator Die Probe wird am Scanner befestigt und die Probe wird relativ zu einer stationären Sonde gescannt. Die am Kraftwechselwirkungssensor 4 montierte Sonde 6 kann auch über die Handzuführschraube 3 an die Probe herangeführt werden. Die Vorauswahl des Untersuchungsortes an der Probe erfolgt über Schraube 9.

Reis. 7 19. Design des SPM NanoEducator: 1 – Basis, 2 – Versorgungsmechanismus,
3 – manuelle Versorgungsschraube, 4 – Interaktionssensor, 5 – Sensorbefestigungsschraube, 6 – Sonde,
7 – Probenhalter, 8 – Scanner, 9, 10 – Schrauben zum Bewegen des Scanners mit der Probe
Ausbildung SPM NanoEducator besteht aus einem Messkopf, einem SPM-Controller und einem Steuerrechner, die über Kabel verbunden sind. Das Mikroskop ist mit einer Videokamera ausgestattet. Das Signal des Interaktionssensors gelangt nach der Umwandlung im Vorverstärker in den SPM-Controller. Arbeitsmanagement SPM NanoEducator erfolgt vom Computer über den SPM-Controller.
Sensor und Sonde für Kraftwechselwirkung
Im Gerät NanoEducator Der Sensor besteht aus einem piezokeramischen Rohr mit einer Länge l=7 mm, Durchmesser D=1,2 mm und Wandstärke H=0,25 mm, einseitig starr befestigt. Auf der Innenfläche des Rohres ist eine leitfähige Elektrode angebracht. Auf der Außenfläche des Rohres sind zwei elektrisch isolierte halbzylindrische Elektroden angebracht. Ein Wolframdraht mit einem Durchmesser von
100 µm (Abb. 7 -20).

Reis. 7 20. Design des Universalsensors des NanoEducator-Geräts
Das freie Ende des als Sonde dienenden Drahtes ist elektrochemisch geschärft, der Krümmungsradius beträgt 0,2 0,05 µm. Die Sonde hat elektrischen Kontakt mit der Innenelektrode des Rohrs und ist mit dem geerdeten Gehäuse des Geräts verbunden.
Durch das Vorhandensein von zwei Außenelektroden am piezoelektrischen Rohr kann ein Teil des piezoelektrischen Rohrs (oben gemäß Abb. 7 -21) als Kraftwechselwirkungssensor (mechanischer Vibrationssensor) und der andere Teil verwendet werden als Piezovibrator. Dem Piezovibrator wird eine elektrische Wechselspannung zugeführt, deren Frequenz der Resonanzfrequenz des Kraftsensors entspricht. Die Amplitude der Schwingungen ist bei einem großen Abstand zwischen Sonde und Probe maximal. Wie aus Abb. ersichtlich ist. 7 -22 weicht die Sonde während des Schwingungsvorgangs um einen Betrag A o von ihrer Gleichgewichtsposition ab, der der Amplitude ihrer erzwungenen mechanischen Schwingungen entspricht (es sind Bruchteile eines Mikrometers), während am zweiten Teil eine elektrische Wechselspannung auftritt des Piezorohrs (Schwingungssensor), proportional zur Auslenkung der Sonde, die vom Gerät gemessen wird.
Wenn sich die Sonde der Oberfläche der Probe nähert, beginnt die Sonde, die Probe zu berühren und dabei zu oszillieren. Dies führt zu einer Verschiebung des Amplitudenfrequenzgangs (AFC) der Sensorschwingungen nach links im Vergleich zum weit von der Oberfläche gemessenen AFC (Abb. 7-22). Da die Frequenz der erzwingenden Schwingungen des Piezorohrs im freien Zustand konstant und gleich der Schwingungsfrequenz o gehalten wird, nimmt die Amplitude ihrer Schwingungen ab, wenn sich die Sonde der Oberfläche nähert, und wird gleich A. Diese Schwingungsamplitude wird aufgezeichnet vom zweiten Teil des Piezorohrs.

Reis. 7 21. Das Funktionsprinzip einer piezoelektrischen Röhre
als Kraftwechselwirkungssensor

Reis. 7 22. Änderung der Schwingfrequenz des Kraftsensors
bei Annäherung an die Probenoberfläche
Scanner
Methode zur Organisation von Mikrobewegungen, die im Gerät verwendet werden NanoEducator basiert auf der Verwendung einer umlaufenden Metallmembran, auf deren Oberfläche eine piezoelektrische Platte aufgeklebt ist (Abb. 7 -23 a). Eine Änderung der Abmessungen der piezoelektrischen Platte unter dem Einfluss der Steuerspannung führt zu einer Durchbiegung der Membran. Indem man solche Membranen auf drei senkrechten Seiten des Würfels platziert und ihre Zentren mit Metallschiebern verbindet, erhält man einen 3-Koordinaten-Scanner (Abb. 7 -23 b).

Reis. 7 23. Funktionsprinzip (a) und Aufbau (b) des Scanners des NanoEducator-Geräts
Jedes piezoelektrische Element 1, das an den Flächen des Würfels 2 befestigt ist, kann beim Anlegen einer elektrischen Spannung den daran befestigten Drücker 3 in eine von drei zueinander senkrechten Richtungen bewegen – X, Y oder Z. Wie aus dem ersichtlich ist Abbildung: Alle drei Drücker sind an einem Punkt 4 verbunden. Mit einiger Näherung können wir davon ausgehen, dass sich dieser Punkt entlang der drei Koordinaten X, Y, Z bewegt. An derselben Stelle ist ein Stativ 5 mit einem Probenhalter 6 befestigt. Somit bewegt sich die Probe unter dem Einfluss von drei unabhängigen Spannungsquellen entlang von drei Koordinaten. In Geräten NanoEducator Die maximale Bewegung der Probe beträgt etwa 5070 µm, was den maximalen Scanbereich bestimmt.
Mechanismus zur automatisierten Annäherung der Sonde an die Probe (Feedback-Erfassung)
Der Bewegungsbereich des Scanners entlang der Z-Achse beträgt etwa 10 μm, daher ist es vor dem Scannen erforderlich, die Sonde in diesem Abstand näher an die Probe heranzuführen. Zu diesem Zweck ist der Versorgungsmechanismus konzipiert, dessen Diagramm in Abb. dargestellt ist. 7 -19. Wenn der Schrittmotor 1 mit elektrischen Impulsen beaufschlagt wird, dreht er die Förderschnecke 2 und bewegt den Stab 3 mit der Sonde 4, wodurch er sich der auf dem Scanner 6 montierten Probe 5 nähert oder weiter entfernt. Die Größe eines Schritts beträgt etwa 2 μm.

Reis. 7 24. Diagramm des Mechanismus zum Anbringen der Sonde an die Oberfläche der Probe
Da die Steigung des Annäherungsmechanismus den erforderlichen Sonden-Proben-Abstand während des Scanvorgangs deutlich überschreitet, erfolgt die Annäherung bei laufendem Schrittmotor und entsprechender Bewegung des Scanners entlang der Z-Achse, um eine Verformung der Sonde zu vermeiden zu folgendem Algorithmus:
1. Das Rückkopplungssystem wird ausgeschaltet und der Scanner „fährt zurück“, d. h. er senkt die Probe in die unterste Extremposition ab.
2. Der Sondenannäherungsmechanismus macht einen Schritt und stoppt.
3. Das Feedback-System schaltet sich ein und der Scanner hebt die Probe sanft an, während er gleichzeitig das Vorhandensein einer Wechselwirkung zwischen Spitze und Probe analysiert.
4. Liegt keine Interaktion vor, wird der Vorgang ab Schritt 1 wiederholt.
Wenn beim Hochziehen des Scanners ein Signal ungleich Null auftritt, stoppt das Feedback-System die Aufwärtsbewegung des Scanners und fixiert das Ausmaß der Interaktion auf einem bestimmten Niveau. Die Größe der Kraftwechselwirkung, bei der die Sondenzufuhr stoppt und der Scanvorgang im Gerät stattfindet NanoEducator gekennzeichnet durch den Parameter Amplitudenunterdrückung (AmplitudeUnterdrückung) :
A=A o . (1- Amplitudenunterdrückung)
Erhalten eines SPM-Images
Nach Aufruf des Programms NanoEducator Auf dem Computerbildschirm erscheint das Hauptprogrammfenster (Abb. 7-20). Die Arbeit sollte mit dem Menüpunkt beginnen Datei und wählen Sie es aus Offen oder Neu oder die entsprechenden Schaltflächen in der Symbolleiste (, ).
Teamauswahl Datei Neu bedeutet den Übergang zur Durchführung von SPM-Messungen und der Auswahl des Befehls Datei Offen bedeutet den Übergang zur Sichtung und Verarbeitung zuvor empfangener Daten. Das Programm ermöglicht Ihnen, Daten parallel zu Messungen anzuzeigen und zu verarbeiten.

Reis. 7 25. Hauptfenster des NanoEducator-Programms
Nach Ausführung des Befehls Datei Neu Auf dem Bildschirm erscheint ein Dialogfeld, in dem Sie einen Arbeitsordner auswählen oder erstellen können, in den standardmäßig die Ergebnisse der aktuellen Messung geschrieben werden. Während des Messvorgangs werden alle empfangenen Daten nacheinander in den genannten Dateien aufgezeichnet ScanData+i.spm, wo Index ich wird beim Programmstart auf Null zurückgesetzt und erhöht sich bei jeder neuen Messung. Dateien ScanData+i.spm im Arbeitsordner abgelegt, der vor Beginn der Messungen installiert wird. Es ist möglich, während der Messung einen anderen Arbeitsordner auszuwählen. Dazu müssen Sie die Taste drücken , befindet sich in der Symbolleiste des Hauptprogrammfensters und wählen Sie den Menüpunkt aus Arbeitsordner ändern.
Um die Ergebnisse der aktuellen Messung zu speichern, müssen Sie die Taste drücken Speichern als Wählen Sie im angezeigten Dialogfeld im Scanfenster einen Ordner aus und geben Sie den Dateinamen und die Datei an ScanData+i.spm, die während der Durchführung von Messungen als temporäre Datenspeicherdatei dient, wird in den von Ihnen angegebenen Dateinamen umbenannt. Standardmäßig wird die Datei in dem Arbeitsordner gespeichert, der vor Beginn der Messungen zugewiesen wurde. Wenn Sie den Vorgang zum Speichern der Messergebnisse nicht durchführen, werden die Ergebnisse beim nächsten Start des Programms in temporären Dateien aufgezeichnet ScanData+i.spm, werden nacheinander überschrieben (es sei denn, der Arbeitsordner wird geändert). Vor dem Schließen und nach dem Start des Programms wird eine Warnung über das Vorhandensein temporärer Dateien mit Messergebnissen im Arbeitsordner ausgegeben. Durch Ändern des Arbeitsordners vor Beginn der Messungen können Sie die Ergebnisse des vorherigen Experiments vor dem Löschen schützen. Standardname ScanData kann durch Einstellung im Arbeitsordner-Auswahlfenster geändert werden. Durch Drücken der Schaltfläche wird das Fenster zur Auswahl eines Arbeitsordners aufgerufen , befindet sich in der Symbolleiste des Hauptprogrammfensters. Sie können im Fenster auch Messergebnisse speichern Browser scannen, wählen Sie nacheinander die erforderlichen Dateien aus und speichern Sie sie im ausgewählten Ordner.
Es ist möglich, die mit dem NanoEducator-Gerät erzielten Ergebnisse in das ASCII-Format und das Nova-Format (NTMDT) zu exportieren, die vom NT MDT Nova-Programm, Image Analysis und anderen Programmen importiert werden können. Bilder von Scans, Daten ihrer Schnitte und Spektroskopiemessergebnisse werden in das ASCII-Format exportiert. Um Daten zu exportieren, klicken Sie auf die Schaltfläche Export befindet sich in der Symbolleiste des Hauptprogrammfensters, oder wählen Sie Export im Menüpunkt DateiÖffnen Sie dieses Fenster und wählen Sie das entsprechende Exportformat aus. Daten zur Verarbeitung und Analyse können sofort an das vorab gestartete Bildanalyseprogramm gesendet werden.
Nach dem Schließen des Dialogfensters erscheint das Instrumentenbedienfeld auf dem Bildschirm.
(Abb. 7 -26).

Reis. 7 26. Bedienfeld des Geräts
Auf der linken Seite des Instrumentenbedienfelds befinden sich Schaltflächen zur Auswahl der SPM-Konfiguration:
SSM– Rasterkraftmikroskop (SFM)
STM– Rastertunnelmikroskop (STM).
Die Durchführung von Messungen am NanoEducator-Trainings-SPM umfasst die Durchführung der folgenden Vorgänge:
1. Beispielinstallation
AUFMERKSAMKEIT! Vor der Installation der Probe müssen Sensor und Sonde entfernt werden, um eine Beschädigung der Sonde zu vermeiden.
Es gibt zwei Möglichkeiten, die Probe anzuhängen:
auf einem magnetischen Tisch (in diesem Fall muss die Probe auf einem magnetischen Substrat befestigt werden);
auf doppelseitigem Klebeband.
AUFMERKSAMKEIT! Um ein Muster auf doppelseitigem Klebeband anzubringen, müssen Sie den Halter vom Ständer abschrauben (um den Scanner nicht zu beschädigen) und ihn dann bis zum leichten Anschlag wieder hineinschrauben.
Bei magnetischer Befestigung kann die Probe ausgetauscht werden, ohne den Probenhalter abzuschrauben.
2. Installation des Sondensensors
AUFMERKSAMKEIT! Installieren Sie den Sensor mit Sonde immer nach der Installation der Probe.
Nachdem Sie den gewünschten Sondensensor ausgewählt haben (halten Sie den Sensor an den Metallkanten der Basis) (siehe Abb. 7 -27), lösen Sie die Schraube, mit der der Sondensensor 2 an der Abdeckung des Messkopfs befestigt ist, und setzen Sie den Sensor in die Halterungsbuchse ein bis zum Anschlag eindrehen und die Befestigungsschraube im Uhrzeigersinn bis zum leichten Anschlag eindrehen.

Reis. 7 27. Installation des Sondensensors
3. Auswahl des Scan-Standorts
Wenn Sie einen Bereich zur Untersuchung einer Probe auswählen, verwenden Sie die beweglichen Schrauben des Zwei-Koordinatentisches an der Unterseite des Geräts.
4. Vorläufige Annäherung der Sonde an die Probe
Der Vorannäherungsvorgang ist nicht für jede Messung zwingend erforderlich; die Notwendigkeit, ihn durchzuführen, hängt vom Abstand zwischen der Probe und der Sondenspitze ab. Es empfiehlt sich, den Vorannäherungsvorgang durchzuführen, wenn der Abstand zwischen der Sondenspitze und der Oberfläche der Probe mehr als 0,51 mm beträgt. Bei automatisierter Annäherung der Sonde an die Probe aus großer Entfernung zwischen ihnen dauert der Annäherungsvorgang sehr lange.
Senken Sie die Sonde mit der manuellen Schraube ab und prüfen Sie dabei visuell den Abstand zwischen ihr und der Probenoberfläche.
5. Erstellen einer Resonanzkurve und Einstellen der Betriebsfrequenz
Dieser Vorgang muss zu Beginn jeder Messung durchgeführt werden und bis zu seiner Durchführung ist der Übergang zu weiteren Messstufen blockiert. Darüber hinaus kommt es während des Messvorgangs manchmal zu Situationen, die eine Wiederholung dieses Vorgangs erfordern (z. B. wenn der Kontakt verloren geht).
Das Resonanzsuchfenster wird durch Drücken der Taste auf dem Instrumentenbedienfeld aufgerufen. Bei diesem Vorgang wird die Amplitude der Sondenschwingungen gemessen, wenn sich die vom Generator eingestellte Frequenz der erzwungenen Schwingungen ändert. Dazu müssen Sie die Taste drücken LAUFEN(Abb. 7 -28).
|
|


Reis. 7 28. Fenster zur Resonanzsuche und Einstellung der Betriebsfrequenz:
a) – automatischer Modus, b) – manueller Modus
Im Modus Auto Die Generatorfrequenz wird automatisch auf die Frequenz eingestellt, bei der die maximale Amplitude der Sondenschwingungen beobachtet wurde. Ein Diagramm, das die Änderung der Schwingungsamplitude der Sonde in einem bestimmten Frequenzbereich zeigt (Abb. 7 -28a), ermöglicht es Ihnen, die Form der Resonanzspitze zu beobachten. Wenn die Resonanzspitze nicht stark genug ausgeprägt ist oder die Amplitude bei der Resonanzfrequenz klein ist ( weniger als 1V), dann ist es notwendig, die Messparameter zu ändern und die Resonanzfrequenz neu zu bestimmen.
Der Modus ist dafür ausgelegt Handbuch. Wenn Sie diesen Modus im Fenster auswählen Bestimmung der Resonanzfrequenz ein zusätzliches Panel erscheint
(Abb. 7 -28b), mit dem Sie die folgenden Parameter anpassen können:
Sondenantriebsspannung, vom Generator eingestellt. Es wird empfohlen, diesen Wert auf ein Minimum (bis auf Null) und nicht mehr als 50 mV einzustellen.
Amplitudenverstärkung ( Amplitudenverstärkung). Wenn die Schwingungsamplitude der Sonde nicht ausreicht (<1 В) рекомендуется увеличить коэффициент Amplitudenverstärkung.
Um den Resonanzsuchvorgang zu starten, müssen Sie die Taste drücken Start.
Modus Handbuch ermöglicht es Ihnen, die ausgewählte Frequenz manuell zu ändern, indem Sie den grünen Cursor mit der Maus auf dem Diagramm bewegen, und die Art der Änderung der Amplitude von Schwingungen in einem engen Wertebereich um die ausgewählte Frequenz zu klären (dafür Sie Der Schalter muss eingestellt werden Manueller Modus positionieren genau und drücken Sie die Taste Start).
6. Interaktionserfassung
Um die Wechselwirkung zu erfassen, wird eine kontrollierte Annäherung von Spitze und Probe mithilfe eines automatisierten Annäherungsmechanismus durchgeführt. Das Kontrollfenster für diesen Vorgang wird durch Drücken der Taste auf dem Bedienfeld des Instruments aufgerufen. Bei der Arbeit mit SCM wird diese Schaltfläche verfügbar, nachdem der Suchvorgang durchgeführt und die Resonanzfrequenz eingestellt wurde. Fenster SSM, Versorgung(Abb. 7 -29) enthält Steuerelemente für den Sondenansatz sowie Parameteranzeigen, mit denen Sie den Fortschritt des Verfahrens analysieren können.

Reis. 7 29. Sonden-Annäherungsfenster
Im Fenster Liefern Der Benutzer hat die Möglichkeit, folgende Größen zu beobachten:
durch Erweitern des Scanners ( ScannerZ) entlang der Z-Achse relativ zum maximal möglichen Wert, angenommen als Einheit. Das Ausmaß der relativen Dehnung des Scanners wird durch den Füllgrad des linken Indikators mit einer Farbe charakterisiert, die der Zone entspricht, in der sich der Scanner gerade befindet: Grün – Arbeitszone, Blau – außerhalb der Arbeitszone, Rot – der Scanner zu nahe an die Probenoberfläche gelangt ist, was zu einer Verformung der Sonde führen kann. Im letzteren Fall gibt das Programm eine akustische Warnung aus;
Schwingungsamplitude der Sonde relativ zur Amplitude seiner Schwingungen ohne Krafteinwirkung, als Einheit angenommen. Die relative Amplitude der Sondenschwingungen wird auf dem rechten Indikator durch den Burgunder-Füllungsgrad angezeigt. Horizontale Markierung auf dem Indikator Schwingungsamplitude der Sonde zeigt eine Ebene an, bei deren Durchqueren der Zustand des Scanners analysiert und dieser automatisch in die Arbeitsposition gebracht wird;
Anzahl der Schritte ( SchJa), in einer bestimmten Richtung übergeben: Annäherung – Annäherung, Rückzug – Entfernung.
Bevor Sie mit dem Absenken der Sonde beginnen, müssen Sie:
Überprüfen Sie, ob die Anfahrparameter richtig eingestellt sind:
Feedback-Gewinn Betriebssystemhärtung auf Wert setzen 3 ,
Stellen Sie sicher, dass der Parameter UnterdrückungAmplitude (Stärke) hat eine Größe von etwa 0,2 (siehe Abb. 7 -29). Andernfalls drücken Sie die Taste Gewalt und im Fenster Interaktionsparameter einstellen (Abb. 7 -30) Wert einstellen UnterdrückungAmplituden gleich 0.2. Für eine feinere Eingabe der Parameterwert UnterdrückungAmplituden vielleicht weniger .
Überprüfen Sie, ob die Einstellungen im Parameterfenster korrekt sind Optionen, Seite Anfahrtsparameter.
Ob eine Interaktion vorliegt oder nicht, lässt sich anhand des linken Indikators erkennen ScannerZ. Vollauszug des Scanners (gesamter Indikator). ScannerZ blau lackiert), sowie ein komplett in Burgund lackierter Blinker Schwingungsamplitude der Sonde(Abbildung 7 -29) zeigen keine Interaktion an. Nach der Suche nach Resonanz und der Einstellung der Betriebsfrequenz wird die Amplitude der freien Schwingungen der Sonde als Einheit angenommen.
Wenn der Scanner vor oder während der Annäherung nicht vollständig ausgefahren ist oder das Programm die Meldung „Fehler!“ anzeigt. Sonde zu nah an der Probe. Überprüfen Sie die Verbindungsparameter oder den physischen Aufbau. Wenn Sie sich an einen sicheren Ort bewegen möchten, empfiehlt es sich, den Anflugvorgang zu unterbrechen und:
A. Ändern Sie einen der Parameter:
Erhöhen Sie die Größe der Interaktion, des Parameters UnterdrückungAmplituden, oder
Wert steigern Betriebssystemhärtung, oder
Erhöhen Sie die Verzögerungszeit zwischen den Anfahrschritten (Parameter Integrationszeit Auf der Seite Anfahrtsparameter Fenster Optionen).
B. Erhöhen Sie den Abstand zwischen der Sondenspitze und der Probe (befolgen Sie dazu die im Absatz beschriebenen Schritte und führen Sie den Vorgang aus Resonanz, und kehren Sie dann zum Verfahren zurück Liefern.

Reis. 7 30. Fenster zum Einstellen des Ausmaßes der Interaktion zwischen Sonde und Probe
Nach der Erfassung einer Interaktion wird die Nachricht „ Die Lieferung ist abgeschlossen“.
Wenn Sie einen Schritt näher kommen müssen, drücken Sie die Taste. In diesem Fall wird zunächst der Schritt ausgeführt und dann die Interaktionserfassungskriterien überprüft. Um die Bewegung zu stoppen, drücken Sie die Taste. Um einen Rückzugsvorgang durchzuführen, müssen Sie die Schnellrückzugstaste drücken
oder drücken Sie die Taste für langsames Einfahren. Wenn Sie eine Stufe zurückziehen müssen, drücken Sie die Taste. In diesem Fall wird zuerst der Schritt ausgeführt und dann die Interaktionserfassungskriterien überprüft
7. Scannen
Nach Abschluss des Anflugverfahrens ( Liefern) und die Interaktion erfassen, wird das Scannen verfügbar (Schaltfläche im Fenster des Instrumenten-Bedienfelds).
Durch Klicken auf diese Schaltfläche (das Scanfenster ist in Abb. 7-31 dargestellt) geht der Benutzer direkt zur Durchführung von Messungen und zum Erhalt von Messergebnissen über.
Bevor Sie den Scanvorgang durchführen, müssen Sie die Scanparameter festlegen. Diese Optionen sind auf der rechten Seite des oberen Fensterbereichs gruppiert. Scannen.
Beim ersten Mal nach dem Start des Programms werden sie standardmäßig installiert:
Scanbereich - Region (Xnm*Ynm): 5000*5000 nm;
Anzahl der PunkteAchsmessungen- X, Y: NX=100, New York=100;
Scanpfad - Richtung bestimmt die Scanrichtung. Mit dem Programm können Sie die Richtung der schnellen Scanachse (X oder Y) auswählen. Wenn Sie das Programm starten, wird es installiert Richtung
Nachdem Sie die Scanparameter eingestellt haben, müssen Sie die Taste drücken Anwenden zur Bestätigung der eingegebenen Parameter und der Schaltfläche Start um mit dem Scannen zu beginnen.

Reis. 7 31. Fenster zur Steuerung des Prozesses und Anzeige der Ergebnisse des SCM-Scans
7.4.Methodische Hinweise
Bevor Sie mit der Arbeit am Rastersondenmikroskop NanoEducator beginnen, sollten Sie die Bedienungsanleitung des Geräts [Ref. 7 -4].
7.5.Sicherheit
Das Gerät wird mit einer Spannung von 220 V betrieben. Das Rastersondenmikroskop NanoEducator wird gemäß PTE und PTB von Verbraucherelektroinstallationen mit Spannungen bis 1000 V betrieben.
7.6.Aufgabe
1. Bereiten Sie Ihre eigenen biologischen Proben für SPM-Studien vor.
2. Studieren Sie in der Praxis den allgemeinen Aufbau des NanoEducator-Geräts.
3. Machen Sie sich mit dem Gerätesteuerungsprogramm NanoEducator vertraut.
4. Nehmen Sie das erste SPM-Bild unter Aufsicht eines Lehrers auf.
5. Verarbeiten und analysieren Sie das resultierende Bild. Welche Bakterienformen sind typisch für Ihre Lösung? Was bestimmt die Form und Größe von Bakterienzellen?
6. Nehmen Sie die Bergey-Bakterien-Determinante und vergleichen Sie die erhaltenen Ergebnisse mit den dort beschriebenen.
7.7.Sicherheitsfragen
1. Welche Methoden gibt es zur Untersuchung biologischer Objekte?
2. Was ist Rastersondenmikroskopie? Welches Prinzip liegt ihm zugrunde?
3. Nennen Sie die Hauptkomponenten des SPM und ihren Zweck.
4. Was ist der piezoelektrische Effekt und wie wird er bei SPM genutzt? Beschreiben Sie die verschiedenen Designs von Scannern.
5. Beschreiben Sie das Gesamtdesign des NanoEducators.
6. Beschreiben Sie den Kraftsensor und sein Funktionsprinzip.
7. Beschreiben Sie den Mechanismus, mit dem die Sonde im NanoEducator-Gerät zur Probe gebracht wird. Erklären Sie die Parameter, die die Wechselwirkungskraft zwischen Sonde und Probe bestimmen.
8. Erklären Sie das Prinzip des Scannens und die Funktionsweise des Feedbacksystems. Erzählen Sie uns von den Kriterien für die Auswahl der Scanparameter.
7.8.Literatur
Zündete. 7 1. Paul de Cruy. Mikrobenjäger. M. Terra. 2001.
Zündete. 7 2. Leitfaden für praktische Kurse in Mikrobiologie. Herausgegeben von Egorova N.S. M.: Nauka, 1995.
Zündete. 7 3. Hoult J., Krieg N., P. Sneath, J. Staley, S. Williams. // Identifikator von Bergey-Bakterien. M.:Mir, 1997. T. Nr. 2. S. 574.
Zündete. 7 4. Bedienungsanleitung des Geräts NanoEducator.Objekte. Nizhny Novgorod. Wissenschafts- und Bildungszentrum...
Skript zur Vorlesung „Rastersondenmikroskopie in der Biologie“ Vorlesungsplan
Abstrakt... ScannenSondeMikroskopie in Biologie" Vorlesungsplan: Einführung, Geschichte der SPM. Grenzen Anwendungen... und Nanostrukturen, ForschungbiologischObjekte: Nobelpreisträger... FürForschung spezifische Probe: B ScannenSondeMikroskopieFür ...
Vorläufiges Programm der XXIII. Russischen Konferenz über Elektronenmikroskopie 1. Juni Dienstagmorgen 10.00 – 14.00 Uhr Eröffnung der Konferenz Einleitungsbemerkungen
ProgrammB.P. Karadzhyan, Yu.L. Ivanova, Yu.F. Ivlev, V.I. Popenko AnwendungSonde und konfokal ScannenMikroskopieFürForschung Reparaturprozesse mit nanodispersen Transplantaten...
1. Allrussische wissenschaftliche Konferenz Methoden zur Untersuchung der Zusammensetzung und Struktur funktioneller Materialien
DokumentierenMEHRELEMENT OBJEKTE OHNE STANDARDS... Lyakhov N.Z. FORSCHUNG NANOKOMPOSITE BIOLOGISCH AKTIV... Aliev V.Sh. ANWENDUNG METHODE SONDEMIKROSKOPIENFÜRFORSCHUNG WIRKUNG... SCAN KALORIMETRIE UND THERMOSTIMULIERTE STÖRUNGEN FÜRFORSCHUNG ...
Einführung
Derzeit entwickelt sich die wissenschaftliche und technische Richtung der Nanotechnologie rasant und deckt ein breites Spektrum sowohl der Grundlagenforschung als auch der angewandten Forschung ab. Hierbei handelt es sich um eine grundlegend neue Technologie, die Probleme in so unterschiedlichen Bereichen wie Kommunikation, Biotechnologie, Mikroelektronik und Energie lösen kann. Heute entwickeln mehr als hundert junge Unternehmen nanotechnologische Produkte, die in den nächsten zwei bis drei Jahren auf den Markt kommen werden.
Nanotechnologien werden zu den Leittechnologien des 21. Jahrhunderts und werden zur Entwicklung der Wirtschaft und des sozialen Bereichs der Gesellschaft beitragen; sie können eine Voraussetzung für eine neue industrielle Revolution werden. In den letzten zweihundert Jahren wurden Fortschritte in der industriellen Revolution auf Kosten von etwa 80 % der Ressourcen der Erde erzielt. Die Nanotechnologie wird den Ressourcenverbrauch erheblich reduzieren und die Umwelt nicht belasten; sie wird eine führende Rolle im Leben der Menschheit spielen, so wie beispielsweise der Computer zu einem festen Bestandteil des Lebens der Menschen geworden ist.
Der Fortschritt in der Nanotechnologie wurde durch die Entwicklung experimenteller Forschungsmethoden vorangetrieben, von denen die aufschlussreichsten Methoden der Rastersondenmikroskopie sind, deren Erfindung und insbesondere deren Verbreitung die Welt den Nobelpreisträgern von 1986 – Professor Heinrich Rohrer und Dr. Gerd Binnig – verdankt.
Die Welt war fasziniert von der Entdeckung solch einfacher Methoden zur Visualisierung von Atomen und sogar von der Möglichkeit, sie zu manipulieren. Viele Forschungsgruppen begannen, selbstgebaute Geräte zu konstruieren und in diese Richtung zu experimentieren. Als Ergebnis entstanden eine Reihe praktischer Geräteschemata und verschiedene Methoden zur Visualisierung der Ergebnisse der Sonden-Oberflächen-Wechselwirkung, wie zum Beispiel: Querkraftmikroskopie, Magnetkraftmikroskopie, Mikroskopie zur Aufzeichnung magnetischer, elektrostatischer und elektromagnetischer Wechselwirkungen. Methoden der optischen Nahfeldmikroskopie wurden intensiv weiterentwickelt. Es wurden Methoden zur gerichteten, kontrollierten Beeinflussung des Systems Sonde-Oberfläche entwickelt, beispielsweise die Nanolithographie – Veränderungen an der Oberfläche treten unter dem Einfluss von elektrischen, magnetischen Einflüssen, plastischen Verformungen und Licht im System Sonde-Oberfläche auf. Es wurden Technologien zur Herstellung von Sonden mit vorgegebenen geometrischen Parametern, mit speziellen Beschichtungen und Strukturen zur Visualisierung verschiedener Oberflächeneigenschaften geschaffen.
Die Rastersondenmikroskopie (SPM) ist eine der leistungsstarken modernen Methoden zur Untersuchung der Morphologie und lokalen Eigenschaften einer festen Oberfläche mit hoher räumlicher Auflösung. In den letzten zehn Jahren hat sich die Rastersondenmikroskopie von einer exotischen Technik, die nur einer begrenzten Anzahl von Forschungsgruppen zur Verfügung stand, zu einem weit verbreiteten und erfolgreichen Werkzeug zur Untersuchung von Oberflächeneigenschaften entwickelt. Derzeit ist nahezu keine Forschung auf dem Gebiet der Oberflächenphysik und Dünnschichttechnologien ohne den Einsatz von SPM-Methoden abgeschlossen. Die Entwicklung der Rastersondenmikroskopie diente auch als Grundlage für die Entwicklung neuer Methoden in der Nanotechnologie – Technologien zur Erzeugung von Strukturen im Nanometerbereich.
1. Historischer Hintergrund
Um kleine Objekte zu beobachten, erfand der Niederländer Antonie van Leeuwenhoek im 17. Jahrhundert das Mikroskop und eröffnete damit die Welt der Mikroben. Seine Mikroskope waren unvollkommen und ermöglichten eine 150- bis 300-fache Vergrößerung. Aber seine Anhänger verbesserten dieses optische Gerät und legten damit den Grundstein für viele Entdeckungen in Biologie, Geologie und Physik. Ende des 19. Jahrhunderts (1872) zeigte der deutsche Optiker Ernst Karl Abbe jedoch, dass aufgrund der Lichtbeugung das Auflösungsvermögen eines Mikroskops (also der Mindestabstand zwischen Objekten, wenn sie noch nicht miteinander verschmolzen sind) sinkt ein Bild) ist durch die Wellenlänge des Lichts (0,4 - 0,8 µm) begrenzt. Dadurch ersparte er Optikern, die fortschrittlichere Mikroskope herstellen wollten, viel Aufwand, enttäuschte jedoch Biologen und Geologen, die die Hoffnung auf ein Instrument mit einer Vergrößerung von mehr als 1500x verloren hatten.
Die Entstehungsgeschichte des Elektronenmikroskops ist ein wunderbares Beispiel dafür, wie unabhängig sich entwickelnde Wissenschafts- und Technologiebereiche durch den Austausch erhaltener Informationen und die Bündelung der Kräfte ein neues leistungsstarkes Werkzeug für die wissenschaftliche Forschung schaffen können. Der Höhepunkt der klassischen Physik war die Theorie des elektromagnetischen Feldes, die die Ausbreitung von Licht, die Entstehung elektrischer und magnetischer Felder und die Bewegung geladener Teilchen in diesen Feldern als Ausbreitung elektromagnetischer Wellen erklärte. Die Wellenoptik verdeutlichte das Phänomen der Beugung, den Mechanismus der Bildentstehung und das Spiel der Faktoren, die die Auflösung im Lichtmikroskop bestimmen. Fortschritte auf dem Gebiet der theoretischen und experimentellen Physik verdanken wir der Entdeckung des Elektrons mit seinen spezifischen Eigenschaften. Diese getrennten und scheinbar unabhängigen Entwicklungspfade führten zu den Grundlagen der Elektronenoptik, deren wichtigste Anwendung die Erfindung der EM in den 1930er Jahren war. Als direkter Hinweis auf diese Möglichkeit kann die Hypothese über die Wellennatur des Elektrons angesehen werden, die 1924 von Louis de Broglie aufgestellt und 1927 von K. Davisson und L. Germer in den USA und J. Thomson in England experimentell bestätigt wurde. Dies legte eine Analogie nahe, die es ermöglichte, ein EM nach den Gesetzen der Wellenoptik zu konstruieren. H. Bush entdeckte, dass man mit Hilfe elektrischer und magnetischer Felder elektronische Bilder erzeugen kann. In den ersten beiden Jahrzehnten des 20. Jahrhunderts. Auch die notwendigen technischen Voraussetzungen wurden geschaffen. Industrielabore, die am Elektronenstrahloszilloskop arbeiteten, stellten Vakuumtechnik, stabile Hochspannungs- und Stromquellen und gute Elektronenemitter her.
1931 meldete R. Rudenberg ein Transmissionselektronenmikroskop zum Patent an, und 1932 bauten M. Knoll und E. Ruska das erste derartige Mikroskop, bei dem Magnetlinsen zur Fokussierung von Elektronen verwendet wurden. Dieses Instrument war der Vorgänger des modernen optischen T(OTEM). (Ruska wurde für seine Bemühungen mit dem Nobelpreis für Physik 1986 belohnt.) 1938 bauten Ruska und B. von Borries einen Prototyp eines industriellen OPEM für Siemens-Halske in Deutschland; Mit diesem Instrument konnte schließlich eine Auflösung von 100 nm erreicht werden. Einige Jahre später bauten A. Prebus und J. Hiller das erste hochauflösende OPEM an der University of Toronto (Kanada).
Die vielfältigen Möglichkeiten von OPEM wurden fast sofort offensichtlich. Die industrielle Produktion wurde gleichzeitig von Siemens-Halske in Deutschland und der RCA Corporation in den USA aufgenommen. Ende der 1940er Jahre begannen andere Unternehmen mit der Produktion solcher Geräte.
Das SEM in seiner heutigen Form wurde 1952 von Charles Otley erfunden. Vorläufige Versionen eines solchen Geräts wurden zwar in den 1930er Jahren von Knoll in Deutschland und in den 1940er Jahren von Zworykin und seinen Kollegen bei der RCA Corporation gebaut, aber nur Otleys Gerät konnte als Grundlage für eine Reihe technischer Verbesserungen dienen, die ihren Höhepunkt erreichten bei der Einführung einer industriellen Version des SEM in die Produktion Mitte der 1960er Jahre. Der Kreis der Verbraucher eines solchen relativ einfach zu bedienenden Geräts mit dreidimensionalem Bild und elektronischem Ausgangssignal hat sich exponentiell erweitert. Derzeit gibt es ein Dutzend industrielle Hersteller von REMs auf drei Kontinenten und Zehntausende solcher Geräte werden in Labors auf der ganzen Welt eingesetzt. In den 1960er Jahren wurden Ultrahochspannungsmikroskope entwickelt, um dickere Proben zu untersuchen. Der Anführer dieser Richtung ist Entwicklung war G. Dupuy in Frankreich, wo 1970 ein Gerät mit einer Beschleunigungsspannung von 3,5 Millionen Volt in Betrieb genommen wurde. RTM wurde 1979 von G. Binnig und G. Rohrer in Zürich erfunden. Dieses sehr einfache Gerät ermöglicht die atomare Auflösung von Für seine Arbeit erhielten Binnig und Rohrer (zeitgleich mit Ruska) den Nobelpreis für die Entwicklung von RTM.
1986 wurde das Rastersondenmikroskop von Rohrer und Binnig erfunden. Seit seiner Erfindung wird STM in großem Umfang von Wissenschaftlern verschiedener Fachgebiete eingesetzt und deckt nahezu alle naturwissenschaftlichen Disziplinen ab, von der Grundlagenforschung in Physik, Chemie und Biologie bis hin zu spezifischen technologischen Anwendungen. Das Funktionsprinzip von STM ist so einfach und die potenziellen Möglichkeiten so groß, dass es selbst in naher Zukunft unmöglich ist, seine Auswirkungen auf Wissenschaft und Technologie vorherzusagen.
Wie sich später herausstellte, lässt sich nahezu jede Wechselwirkung der Spitzensonde mit der Oberfläche (mechanisch, magnetisch) mit entsprechenden Instrumenten und Computerprogrammen in ein Abbild der Oberfläche umwandeln.
Die Installation des Rastersondenmikroskops besteht aus mehreren Funktionsblöcken, die in Abb. 1. Dies ist zum einen das Mikroskop selbst mit einem Piezomanipulator zur Steuerung der Sonde, einem Tunnel-Strom-Spannungs-Wandler und einem Schrittmotor zur Probenzufuhr; Block aus Analog-Digital- und Digital-Analog-Wandlern und Hochspannungsverstärkern; Schrittmotor-Steuergerät; eine Platine mit einem Signalprozessor, der das Rückmeldungssignal berechnet; ein Computer, der Informationen sammelt und dem Benutzer eine Schnittstelle bereitstellt. Strukturell ist die DAC- und ADC-Einheit im selben Gehäuse wie die Schrittmotor-Steuereinheit verbaut. Eine Karte mit einem Signalprozessor (DSP – Digital Signal Processor) ADSP 2171 von Analog Devices wird in den ISA-Erweiterungssteckplatz eines Personal Computers eingebaut.
Eine allgemeine Ansicht des mechanischen Systems des Mikroskops ist in Abb. dargestellt. 2. Das mechanische System umfasst eine Basis mit einem Piezo-Manipulator und einem reibungslosen Probenzuführungssystem auf einem Schrittmotor mit Getriebe und zwei abnehmbaren Messköpfen für den Betrieb im Rastertunnel- und Rasterkraftmikroskopiemodus. Das Mikroskop ermöglicht die Erzielung einer stabilen atomaren Auflösung auf herkömmlichen Testoberflächen ohne den Einsatz zusätzlicher seismischer und akustischer Filter.
2. Funktionsprinzipien von Rastersondenmikroskopen
Bei Rastersondenmikroskopen erfolgt die Untersuchung des Oberflächenmikroreliefs und seiner lokalen Eigenschaften mithilfe speziell präparierter Sonden in Form von Nadeln. Der Arbeitsteil solcher Sonden (die Spitze) hat Abmessungen von etwa zehn Nanometern. Der charakteristische Abstand zwischen Sonde und Probenoberfläche liegt bei Sondenmikroskopen in der Größenordnung von 0,1 – 10 nm. Die Funktionsweise von Sondenmikroskopen basiert auf verschiedenen Arten der Wechselwirkung zwischen Sonde und Oberfläche. Somit basiert die Funktionsweise eines Tunnelmikroskops auf dem Phänomen des Tunnelstroms, der zwischen einer Metallnadel und einer leitenden Probe fließt; Dem Betrieb von Atomkraft-, Magnetkraft- und elektrischen Kraftmikroskopen liegen verschiedene Arten von Kraftwechselwirkungen zugrunde. Betrachten wir die gemeinsamen Merkmale verschiedener Sondenmikroskope. Die Wechselwirkung der Sonde mit der Oberfläche sei durch einen bestimmten Parameter P charakterisiert. Wenn eine ausreichend scharfe und eins-zu-eins-Abhängigkeit des Parameters P vom Sonden-Proben-Abstand besteht, kann dieser Parameter zur Organisation von a verwendet werden Rückkopplungssystem (FS), das den Abstand zwischen der Sonde und der Probe steuert. In Abb. Abbildung 3 zeigt schematisch das allgemeine Prinzip der Organisation von SPM-Feedback.
Das Rückkopplungssystem hält den Wert des Parameters P konstant und entspricht dem vom Bediener angegebenen Wert. Ändert sich der Sonden-Oberflächenabstand, so ändert sich der Parameter P. Im OS-System wird proportional zum Wert ΔP = P - P ein Differenzsignal erzeugt, das auf den erforderlichen Wert verstärkt und dem Aktorelement IE zugeführt wird. Der Aktuator verarbeitet dieses Differenzsignal und bringt die Sonde näher an die Oberfläche oder bewegt sie weg, bis das Differenzsignal Null wird. Auf diese Weise kann der Sonden-Proben-Abstand mit großer Genauigkeit eingehalten werden. Wenn sich die Sonde entlang der Oberfläche der Probe bewegt, ändert sich der Wechselwirkungsparameter P aufgrund der Oberflächentopographie. Das OS-System verarbeitet diese Änderungen, sodass bei Bewegungen der Sonde in der X- und Y-Ebene das Signal am Aktuator proportional zur Oberflächentopographie ist. Um ein SPM-Bild zu erhalten, wird ein speziell organisierter Prozess zum Scannen der Probe durchgeführt. Beim Scannen bewegt sich die Sonde zunächst entlang einer bestimmten Linie über die Probe (Linienscan), während der Signalwert am Aktuator, proportional zur Oberflächentopographie, im Computerspeicher aufgezeichnet wird. Anschließend kehrt die Sonde zum Startpunkt zurück und bewegt sich zur nächsten Scanlinie (Frame-Scan), und der Vorgang wiederholt sich erneut. Das auf diese Weise beim Scannen erfasste Rückkopplungssignal wird von einem Computer verarbeitet und anschließend mit Computergrafiktools ein SPM-Bild des Oberflächenreliefs erstellt. Neben der Untersuchung der Oberflächentopographie ermöglichen Sondenmikroskope die Untersuchung verschiedener Oberflächeneigenschaften: mechanische, elektrische, magnetische, optische und andere.
3. Abtastelemente (Scanner) von Sondenmikroskopen
3.1 Scanelemente
Für den Betrieb von Sondenmikroskopen ist es notwendig, den Arbeitsabstand zwischen Sonde und Probe zu kontrollieren und die Sonde in der Probenebene mit hoher Genauigkeit (auf der Ebene von Bruchteilen eines Angström) zu bewegen. Dieses Problem wird mit Hilfe spezieller Manipulatoren – Scanelemente (Scanner) – gelöst. Die Rasterelemente von Sondenmikroskopen bestehen aus Piezoelektrika – Materialien mit piezoelektrischen Eigenschaften. Piezoelektrika verändern ihre Abmessungen in einem externen elektrischen Feld. Die Gleichung für den inversen piezoelektrischen Effekt für Kristalle lautet:
Dabei ist u der Dehnungstensor, E die elektrischen Feldkomponenten und d die Komponenten des piezoelektrischen Koeffiziententensors. Die Form des piezoelektrischen Koeffiziententensors wird durch die Art der Symmetrie der Kristalle bestimmt.
Wandler aus piezokeramischen Materialien haben in verschiedenen technischen Anwendungen weite Verbreitung gefunden. Piezokeramik ist ein polarisiertes polykristallines Material, das durch Sintern von Pulvern aus kristallinen Ferroelektrika gewonnen wird. Die Polarisation von Keramik wird wie folgt durchgeführt. Die Keramiken werden über die Curie-Temperatur erhitzt (bei den meisten Piezokeramiken liegt diese Temperatur unter 300 °C) und dann in einem starken elektrischen Feld (ca. 3 kV/cm) langsam abgekühlt. Nach dem Abkühlen hat die Piezokeramik eine Polarisation induziert und erlangt die Fähigkeit, ihre Größe zu ändern (Zunahme oder Abnahme abhängig von der gegenseitigen Richtung des Polarisationsvektors und des Vektors des externen elektrischen Feldes).
Rohrförmige Piezoelemente haben in der Rastersondenmikroskopie eine weite Verbreitung gefunden (Abb. 4). Sie ermöglichen es, mit relativ kleinen Steuerspannungen größere Bewegungen von Objekten zu erzielen. Rohrförmige Piezoelemente sind hohle dünnwandige Zylinder aus piezokeramischen Materialien. Typischerweise werden Elektroden in Form dünner Metallschichten auf die Außen- und Innenflächen des Rohrs aufgebracht, während die Enden des Rohrs unbedeckt bleiben.
Unter dem Einfluss der Potentialdifferenz zwischen Innen- und Außenelektrode verändert das Rohr seine Längsabmessungen. In diesem Fall kann die Längsverformung unter Einwirkung eines radialen elektrischen Feldes wie folgt geschrieben werden:
Dabei ist l die Länge des Rohres im unverformbaren Zustand. Die absolute Dehnung des Piezorohrs ist gleich
Dabei ist h die Wandstärke des Piezorohrs und V die Potentialdifferenz zwischen Innen- und Außenelektrode. Somit ist bei gleicher Spannung V die Dehnung des Rohrs umso größer, je größer seine Länge und je geringer die Dicke seiner Wand ist.
Durch die Verbindung von drei Rohren zu einer Einheit können Sie präzise Bewegungen der Mikroskopsonde in drei zueinander senkrechten Richtungen organisieren. Dieses Scanelement wird Stativ genannt.
Die Nachteile eines solchen Scanners sind die Komplexität der Herstellung und die starke Asymmetrie des Designs. Heutzutage werden in der Rastersondenmikroskopie am häufigsten Scanner verwendet, die auf einem einzigen röhrenförmigen Element basieren. Die Gesamtansicht des röhrenförmigen Scanners und der Elektrodenanordnung ist in Abb. dargestellt. 5. Das Rohrmaterial hat eine radiale Richtung des Polarisationsvektors.
Die Innenelektrode ist normalerweise massiv. Die Außenelektrode des Scanners ist entlang des Zylinders in vier Abschnitte unterteilt. Wenn an entgegengesetzte Abschnitte der Außenelektrode (relativ zur Innenelektrode) gegenphasige Spannungen angelegt werden, zieht sich der Abschnitt der Röhre an der Stelle zusammen, an der die Feldrichtung mit der Polarisationsrichtung übereinstimmt, und verlängert sich dort, wo sie entgegengesetzt gerichtet sind Richtungen. Dadurch wird das Rohr in die entsprechende Richtung gebogen. Auf diese Weise erfolgt die Abtastung in der X-, Y-Ebene. Eine Änderung des Potentials der Innenelektrode relativ zu allen Außenabschnitten führt zu einer Verlängerung oder Verkürzung des Rohrs entlang der Z-Achse. Somit ist es möglich, eine drei- Koordinatenscanner auf Basis einer einzelnen Piezoröhre. Echte Abtastelemente sind oft komplexer aufgebaut, die Funktionsprinzipien bleiben jedoch gleich.
Auch Scanner auf Basis bimorpher Piezoelemente haben sich durchgesetzt. Der Bimorph besteht aus zwei piezoelektrischen Platten, die so zusammengeklebt sind, dass die Polarisationsvektoren in jeder von ihnen in entgegengesetzte Richtungen gerichtet sind (Abb. 6). Wenn an die bimorphen Elektroden Spannung angelegt wird, wie in Abb. 6, dann dehnt sich eine der Platten aus und die andere zieht sich zusammen, was zu einer Biegung des gesamten Elements führt. Bei realen Konstruktionen bimorpher Elemente wird eine Potentialdifferenz zwischen der internen gemeinsamen und der externen Elektrode erzeugt, sodass das Feld in einem Element mit der Richtung des Polarisationsvektors übereinstimmt und im anderen Element in die entgegengesetzte Richtung gerichtet ist.
Die Bimorphung eines Bimorphs unter dem Einfluss elektrischer Felder ist die Grundlage für den Betrieb bimorpher Piezoscanner. Durch die Kombination von drei bimorphen Elementen in einem Design ist es möglich, ein Stativ auf bimorphen Elementen zu realisieren.
Wenn die Außenelektroden des bimorphen Elements in vier Sektoren unterteilt sind, ist es möglich, die Bewegung der Sonde entlang der Z-Achse und in der X-, Y-Ebene auf einem bimorphen Element zu organisieren (Abb. 7).
Tatsächlich ist es durch Anlegen gegenphasiger Spannungen an gegenüberliegende Abschnittspaare externer Elektroden möglich, den Bimorph so zu biegen, dass sich die Sonde in der X-, Y-Ebene bewegt (Abb. 7 (a, b)). Und durch Ändern des Potentials der Innenelektrode relativ zu allen Abschnitten der Außenelektroden ist es möglich, den Bimorph durch Bewegen der Sonde in Z-Richtung zu biegen (Abb. 7 (c, d)).
3.2 Nichtlinearität von Piezokeramiken
Trotz einer Reihe technologischer Vorteile gegenüber Kristallen weisen Piezokeramiken einige Nachteile auf, die sich negativ auf die Funktion von Abtastelementen auswirken. Einer dieser Nachteile ist die Nichtlinearität der piezoelektrischen Eigenschaften. In Abb. Als Beispiel zeigt Abb. 8 die Abhängigkeit der Größe der Verschiebung des Piezorohrs in Z-Richtung von der Größe des angelegten Feldes. Im Allgemeinen (insbesondere bei großen Steuerfeldern) zeichnen sich Piezokeramiken durch eine nichtlineare Abhängigkeit der Verformungen vom Feld (bzw. von der Steuerspannung) aus.
Somit ist die Verformung von Piezokeramiken eine komplexe Funktion des äußeren elektrischen Feldes:
Für kleine Kontrollfelder lässt sich diese Abhängigkeit in folgender Form darstellen:
u = d* E+ α* E*E+…
wobei d und α die linearen und quadratischen Module des piezoelektrischen Effekts sind.
Typische Feldwerte E, bei denen nichtlineare Effekte auftreten, liegen in der Größenordnung von 100 V/mm. Daher sind für den korrekten Betrieb von Abtastelementen Kontrollfelder im Bereich der Linearität von Keramiken (E< Е) .
Rastersondenelektronenmikroskop
3.3 Kriechen von Piezokeramiken und Hysterese von Piezokeramiken
Ein weiterer Nachteil von Piezokeramiken ist das sogenannte Kriechen (Kriechen) – eine verzögerte Reaktion auf eine Änderung des Wertes des elektrischen Steuerfeldes.
Kriechen führt zu geometrischen Verzerrungen, die mit diesem Effekt verbunden sind und in SPM-Bildern beobachtet werden. Kriechen wirkt sich besonders stark aus, wenn Scanner an einen bestimmten Punkt gebracht werden, um lokale Messungen durchzuführen, und in der Anfangsphase des Scanvorgangs. Um den Einfluss des Keramikkriechens zu reduzieren, werden bei diesen Verfahren Zeitverzögerungen eingesetzt, die es ermöglichen, die Scannerverzögerung teilweise zu kompensieren.
Ein weiterer Nachteil von Piezokeramiken ist die Unklarheit der Abhängigkeit der Dehnung von der Richtung der Änderung des elektrischen Feldes (Hysterese).
Dies führt dazu, dass die Piezokeramik bei gleichen Steuerspannungen je nach Bewegungsrichtung an unterschiedlichen Punkten der Flugbahn erscheint. Um Verzerrungen in SPM-Bildern zu vermeiden, die durch die Hysterese von Piezokeramiken verursacht werden, werden Informationen beim Scannen von Proben nur auf einem der Zweige der Abhängigkeit aufgezeichnet.
4. Geräte für präzise Bewegungen von Sonde und Probe
4.1 Mechanische Getriebe
Eines der wichtigsten technischen Probleme bei der Rastersondenmikroskopie ist die Notwendigkeit einer präzisen Bewegung von Sonde und Probe, um den Arbeitsspalt des Mikroskops zu bilden und den zu untersuchenden Oberflächenbereich auszuwählen. Um dieses Problem zu lösen, werden verschiedene Arten von Geräten verwendet, die Objekte mit hoher Genauigkeit bewegen. Verbreitet haben sich verschiedene mechanische Getriebe, bei denen die grobe Bewegung des ursprünglichen Bewegers der feinen Bewegung des verschobenen Objekts entspricht. Methoden zur Reduzierung von Bewegungen können unterschiedlich sein. Weit verbreitet sind Hebelvorrichtungen, bei denen die Reduzierung des Bewegungsumfangs durch den Längenunterschied der Hebelarme erfolgt. Das Diagramm des Hebelgetriebes ist in Abb. dargestellt. 9.
Mit dem mechanischen Hebel können Sie eine Bewegungsreduzierung mit einem Koeffizienten erzielen
Je größer also das Verhältnis von Arm L zu Arm l ist, desto genauer lässt sich der Prozess der Annäherung an Sonde und Probe steuern.
Auch bei der Konstruktion von Mikroskopen werden häufig mechanische Getriebe eingesetzt, bei denen die Bewegungsreduzierung durch den Unterschied der Steifigkeitskoeffizienten zweier in Reihe geschalteter elastischer Elemente erreicht wird (Abb. 10). Die Struktur besteht aus einer starren Basis, einer Feder und einem elastischen Balken. Die Steifigkeit der Feder k und des elastischen Balkens K werden so gewählt, dass die Bedingung erfüllt ist: k< K .
Der Reduktionskoeffizient ist gleich dem Verhältnis der Steifigkeitskoeffizienten der elastischen Elemente:
Je größer also das Verhältnis von Balkensteifigkeit zu Federsteifigkeit ist, desto genauer kann die Verschiebung des Mikroskop-Arbeitselements gesteuert werden.
4.2 Schrittmotoren
Schrittmotoren (SEM) sind elektromechanische Geräte, die elektrische Impulse in diskrete mechanische Bewegungen umwandeln. Ein wichtiger Vorteil von Schrittmotoren besteht darin, dass sie eine eindeutige Abhängigkeit der Rotorposition von den Eingangsstromimpulsen bieten, sodass der Drehwinkel des Rotors durch die Anzahl der Steuerimpulse bestimmt wird. Bei SHED wird das Drehmoment durch magnetische Flüsse erzeugt, die von den Stator- und Rotorpolen erzeugt werden, die relativ zueinander geeignet ausgerichtet sind.
Die einfachste Ausführung ist für Permanentmagnetmotoren. Sie bestehen aus einem Stator mit Wicklungen und einem Rotor mit Permanentmagneten. In Abb. Abbildung 11 zeigt einen vereinfachten Aufbau eines Schrittmotors.
Die Wechselpole des Rotors haben eine geradlinige Form und liegen parallel zur Motorachse. Der in der Abbildung dargestellte Motor verfügt über 3 Rotorpolpaare und 2 Statorpolpaare. Der Motor verfügt über 2 unabhängige Wicklungen, die jeweils auf zwei gegenüberliegende Pole des Stators gewickelt sind. Der abgebildete Motor hat eine Schrittweite von 30 Grad. Wenn der Strom in einer der Wicklungen eingeschaltet wird, neigt der Rotor dazu, eine Position einzunehmen, in der die entgegengesetzten Pole von Rotor und Stator einander gegenüberstehen. Um eine kontinuierliche Drehung zu erreichen, müssen Sie die Wicklungen abwechselnd einschalten.
In der Praxis kommen Schrittmotoren zum Einsatz, die komplexer aufgebaut sind und 100 bis 400 Schritte pro Rotorumdrehung leisten. Wird ein solcher Motor mit einem Gewindeanschluss gepaart, so ist bei einer Gewindesteigung von etwa 0,1 mm eine Objektpositionierungsgenauigkeit von etwa 0,25 – 1 Mikrometer gewährleistet. Zur Erhöhung der Genauigkeit werden zusätzliche mechanische Getriebe eingesetzt. Die Möglichkeit der elektrischen Steuerung ermöglicht den effektiven Einsatz des ShED in automatisierten Systemen zur Sonden- und Probenannäherung von Rastersondenmikroskopen.
4.3 Piezo-Schrittmotoren
Die Anforderungen an eine gute Isolierung der Instrumente von externen Vibrationen und die Notwendigkeit, Sondenmikroskope unter Vakuumbedingungen zu betreiben, erlegen der Verwendung rein mechanischer Geräte zum Bewegen der Sonde und der Probe erhebliche Einschränkungen auf. In diesem Zusammenhang haben sich in Sondenmikroskopen Geräte durchgesetzt, die auf piezoelektrischen Wandlern basieren und eine Fernsteuerung der Bewegung von Objekten ermöglichen.
Eine der Konstruktionen eines Schritt-Trägheits-Piezomotors ist in Abb. dargestellt. 12. Dieses Gerät enthält eine Basis (1), auf der ein piezoelektrisches Rohr (2) befestigt ist. Das Rohr weist an der Außen- und Innenfläche Elektroden (3) auf. Am Ende des Rohrs befindet sich eine geteilte Feder (4), bei der es sich um einen Zylinder mit separaten Federblättern handelt. In der Feder ist ein Objekthalter (5) eingebaut – ein ziemlich massiver Zylinder mit polierter Oberfläche. Das zu bewegende Objekt kann mittels einer Feder oder einer Überwurfmutter an der Halterung befestigt werden, wodurch das Gerät in jeder beliebigen Ausrichtung im Raum betrieben werden kann.
Das Gerät funktioniert wie folgt. Um den Objekthalter in Richtung der Z-Achse zu bewegen, wird eine Sägezahnimpulsspannung an die Elektroden des Piezorohrs angelegt (Abb. 13).
Auf der flachen Vorderseite der Sägezahnspannung verlängert oder schrumpft die Röhre je nach Polarität der Spannung sanft und ihr Ende wird zusammen mit der Feder und dem Objekthalter um die Strecke verschoben:
In dem Moment, in dem die Sägezahnspannung nachlässt, kehrt die Röhre mit der Beschleunigung a in ihre ursprüngliche Position zurück, die zunächst einen Maximalwert hat:
wobei ω die Resonanzfrequenz der Längsschwingungen des Rohrs ist. Wenn Bedingung F erfüllt ist< ma (m – масса держателя объекта, F - сила трения между держателем объекта и разрезной пружиной), держатель объекта, в силу своей инерционности, проскальзывает относительно разрезной пружины. В результате держатель объекта перемещается на некоторый шаг К Δl относительно исходного положения. Коэффициент К определяется соотношением масс деталей конструкции и жесткостью разрезной пружины. При смене полярности импульсов управляющего напряжения происходит изменение направления движения объекта. Таким образом, подавая пилообразные напряжения различной полярности на электроды пьезотрубки, можно перемещать объект в пространстве и производить сближение зонда и образца в сканирующем зондовом микроскопе .
5. Schutz von Sondenmikroskopen vor äußeren Einflüssen
5.1 Vibrationsschutz
Um Geräte vor externen Vibrationen zu schützen, werden verschiedene Arten von Vibrationsisolationssystemen eingesetzt. Herkömmlicherweise können sie in passiv und aktiv unterteilt werden. Die Grundidee hinter passiven Schwingungsisolationssystemen ist folgende. Die Amplitude erzwungener Schwingungen eines mechanischen Systems nimmt schnell ab, wenn die Differenz zwischen der Frequenz der Erregerkraft und der Eigenresonanzfrequenz des Systems zunimmt (ein typischer Amplituden-Frequenzgang (AFC) eines schwingungsfähigen Systems ist in Abb. 14 dargestellt ).
Daher haben äußere Einflüsse mit Frequenzen ω > ω praktisch keinen merklichen Einfluss auf das schwingungsfähige System. Wenn Sie also den Messkopf eines Sondenmikroskops auf einer schwingungsisolierenden Plattform oder auf einer elastischen Aufhängung platzieren (Abb. 15), passieren nur äußere Schwingungen mit Frequenzen nahe der Resonanzfrequenz des schwingungsisolierenden Systems Mikroskopkörper. Da die Eigenfrequenzen von SPM-Köpfen bei 10–100 kHz liegen, können Sie das Gerät sehr effektiv vor externen Vibrationen schützen, indem Sie die Resonanzfrequenz des Vibrationsisolationssystems recht niedrig wählen (ca. 5–10 Hz). Um Schwingungen bei Eigenresonanzfrequenzen zu dämpfen, werden dissipative Elemente mit viskoser Reibung in schwingungsisolierende Systeme eingebracht.
Um einen wirksamen Schutz zu gewährleisten, ist es daher erforderlich, dass die Resonanzfrequenz des Schwingungsisolationssystems so niedrig wie möglich ist. Allerdings sind sehr niedrige Frequenzen in der Praxis nur schwer zu realisieren.
Zum Schutz von SPM-Köpfen werden aktive Systeme zur Unterdrückung externer Vibrationen erfolgreich eingesetzt. Bei solchen Geräten handelt es sich um elektromechanische Systeme mit negativer Rückkopplung, die eine stabile Position der schwingungsisolierenden Plattform im Raum gewährleisten (Abb. 16).
5.2 Akustischer Lärmschutz
Eine weitere Vibrationsquelle in den Konstruktionselementen von Sondenmikroskopen sind akustische Geräusche unterschiedlicher Art.
Ein Merkmal der akustischen Interferenz besteht darin, dass akustische Wellen direkt auf die Strukturelemente der SPM-Köpfe einwirken, was zu Schwingungen der Sonde relativ zur Oberfläche der untersuchten Probe führt. Um SPMs vor akustischen Störungen zu schützen, werden verschiedene Schutzkappen verwendet, die den Grad akustischer Störungen im Bereich des Arbeitsspalts des Mikroskops deutlich reduzieren können. Der wirksamste Schutz vor akustischen Störungen besteht darin, den Messkopf des Sondenmikroskops in einer Vakuumkammer zu platzieren (Abb. 17).
5.3 Stabilisierung der thermischen Drift der Sondenposition über der Oberfläche
Eines der wichtigen Probleme von SPM ist die Stabilisierung der Position der Sonde über der Oberfläche der untersuchten Probe. Die Hauptursache für die Instabilität der Sondenposition ist eine Änderung der Umgebungstemperatur oder eine Erwärmung der Strukturelemente des Sondenmikroskops während seines Betriebs. Eine Temperaturänderung eines Festkörpers führt zum Auftreten thermoelastischer Verformungen. Solche Verformungen haben einen ganz erheblichen Einfluss auf die Funktion von Sondenmikroskopen. Um die thermische Drift zu reduzieren, wird eine Thermostatisierung der SPM-Messköpfe eingesetzt oder es werden thermische Ausgleichselemente in das Design der Köpfe eingebaut. Die Idee der thermischen Kompensation ist wie folgt. Jedes SPM-Design kann als eine Reihe von Elementen mit unterschiedlichen Wärmeausdehnungskoeffizienten dargestellt werden (Abb. 18 (a)).
Um die thermische Drift zu kompensieren, werden in die Konstruktion von SPM-Messköpfen Ausgleichselemente mit unterschiedlichen Ausdehnungskoeffizienten eingeführt, sodass die Bedingung erfüllt ist, dass die Summe der Temperaturausdehnungen in verschiedenen Armen der Struktur gleich Null ist:
ΔL = ∑ ΔL = ΔT ∑αl0
Der einfachste Weg, die thermische Drift der Sondenposition entlang der Z-Achse zu reduzieren, besteht darin, in das SPM-Design Ausgleichselemente einzuführen, die aus demselben Material und mit denselben charakteristischen Abmessungen wie die Hauptstrukturelemente bestehen (Abb. 18 (b)). Wenn sich die Temperatur dieser Konstruktion ändert, ist die Verschiebung der Sonde in Z-Richtung minimal. Um die Position der Sonde in der X-, Y-Ebene zu stabilisieren, werden die Messköpfe von Mikroskopen in Form axialsymmetrischer Strukturen hergestellt.
6. Bildung und Verarbeitung von SPM-Bildern
6.1 Scanvorgang
Der Vorgang des Scannens einer Oberfläche in einem Rastersondenmikroskop ähnelt der Bewegung eines Elektronenstrahls über den Bildschirm in einer Fernsehkathodenstrahlröhre. Die Sonde bewegt sich entlang der Linie (Zeile), zunächst in Vorwärtsrichtung, dann in Rückwärtsrichtung (Linienscan) und bewegt sich dann zur nächsten Linie (Rahmenscan) (Abb. 19). Die Sonde bewegt sich mithilfe eines Scanners in kleinen Schritten unter der Wirkung von Sägezahnspannungen, die von Digital-Analog-Wandlern erzeugt werden. Die Erfassung von Informationen über die Oberflächentopographie erfolgt in der Regel im Direktdurchgang.
Mit einem Rastersondenmikroskop gewonnene Informationen werden in Form eines SPM-Rahmens gespeichert – einem zweidimensionalen Array von ganzen Zahlen a (Matrix). Die physikalische Bedeutung dieser Zahlen wird durch den Wert bestimmt, der beim Scanvorgang digitalisiert wurde. Jeder Wert eines Indexpaares ij entspricht einem bestimmten Oberflächenpunkt innerhalb des Scanfeldes. Die Koordinaten von Oberflächenpunkten werden berechnet, indem einfach der entsprechende Index mit dem Abstand zwischen den Punkten multipliziert wird, an denen die Informationen aufgezeichnet wurden.
SPM-Frames sind in der Regel quadratische Matrizen der Größe 2 (meist 256x256 und 512x512 Elemente). Die Visualisierung von SPM-Frames erfolgt mithilfe von Computergrafiken, hauptsächlich in Form von dreidimensionalen (3D) und zweidimensionalen Helligkeitsbildern (2D). Bei der 3D-Visualisierung wird ein Bild einer Oberfläche in einer axonometrischen Perspektive mithilfe von Pixeln oder Linien erstellt. Darüber hinaus werden verschiedene Methoden verwendet, um Pixel hervorzuheben, die unterschiedlichen Höhen des Oberflächenreliefs entsprechen. Der effektivste Weg, 3D-Bilder einzufärben, besteht darin, die Bedingungen der Oberflächenbeleuchtung mit einer Punktquelle zu simulieren, die sich an einem bestimmten Punkt im Raum über der Oberfläche befindet (Abb. 20). Gleichzeitig ist es möglich, kleinräumige Unebenheiten des Reliefs hervorzuheben. Mithilfe von Computerverarbeitung und Grafiken werden außerdem die Skalierung und Drehung von 3D-SPM-Bildern realisiert. Bei der 2D-Visualisierung wird jedem Oberflächenpunkt eine Farbe zugewiesen. Am weitesten verbreitet sind Verlaufspaletten, bei denen das Bild entsprechend der Höhe eines Punktes auf der Oberfläche in einem bestimmten Farbton eingefärbt wird.
Bei lokalen SPM-Messungen werden in der Regel die Abhängigkeiten der untersuchten Größen von verschiedenen Parametern erfasst. Dies sind beispielsweise die Abhängigkeiten der Größe des elektrischen Stroms durch den Sonden-Oberflächenkontakt von der angelegten Spannung, die Abhängigkeiten verschiedener Parameter der Kraftwechselwirkung zwischen Sonde und Oberfläche vom Sonden-Proben-Abstand usw. Dies Informationen werden in Form von Vektorarrays oder in Form von 2 x N-Matrizen gespeichert. Für deren Visualisierung stellt die Mikroskopsoftware eine Reihe von Standardwerkzeugen zur Darstellung von Funktionsgraphen zur Verfügung.
6.2 Methoden zur Konstruktion und Verarbeitung von Bildern
Bei der Untersuchung der Eigenschaften von Objekten mit Methoden der Rastersondenmikroskopie sind das Hauptergebnis wissenschaftlicher Forschung in der Regel dreidimensionale Bilder der Oberfläche dieser Objekte. Die Angemessenheit der Bildinterpretation hängt von der Qualifikation des Spezialisten ab. Gleichzeitig kommen bei der Bearbeitung und Konstruktion von Bildern eine Reihe traditioneller Techniken zum Einsatz, die Sie bei der Bildanalyse kennen sollten. Das Rastersondenmikroskop erschien in einer Zeit intensiver Entwicklung der Computertechnologie. Daher nutzte es bei der Aufnahme dreidimensionaler Bilder digitale Speichermethoden, die für Computer entwickelt wurden. Dies führte zu einer erheblichen Vereinfachung der Bildanalyse und -verarbeitung, musste jedoch auf die fotografische Qualität verzichten, die elektronenmikroskopischen Methoden innewohnt. Die mit einem Sondenmikroskop gewonnenen Informationen werden in einem Computer als zweidimensionale Matrix aus ganzen Zahlen dargestellt. Jede Zahl in dieser Matrix kann je nach Scanmodus ein Tunnelstromwert, ein Abweichungswert oder der Wert einer komplexeren Funktion sein. Wenn Sie diese Matrix einer Person zeigen, kann sie sich keine zusammenhängende Vorstellung von der untersuchten Oberfläche machen. Das erste Problem besteht also darin, die Zahlen in eine leicht verständliche Form umzuwandeln. Dies geschieht wie folgt. Die Zahlen in der Originalmatrix liegen in einem bestimmten Bereich, es gibt Minimal- und Maximalwerte. Diesem Ganzzahlbereich wird eine Farbpalette zugewiesen. Somit wird jeder Wert der Matrix einem Punkt einer bestimmten Farbe auf dem rechteckigen Bild zugeordnet. Die Zeile und Spalte, in der sich dieser Wert befindet, werden zu den Koordinaten des Punktes. Als Ergebnis erhalten wir ein Bild, in dem beispielsweise die Höhe der Oberfläche farblich wiedergegeben wird – wie auf einer geografischen Karte. Aber auf einer Karte werden normalerweise nur Dutzende Farben verwendet, auf unserem Bild sind es jedoch Hunderte und Tausende davon. Um die Wahrnehmung zu erleichtern, sollten Punkte mit ähnlicher Höhe in ähnlichen Farben dargestellt werden. Es kann vorkommen und kommt in der Regel immer vor, dass der Bereich der Anfangswerte größer ist als die Anzahl der möglichen Farben. In diesem Fall gehen Informationen verloren und eine Erhöhung der Farbanzahl ist keine Lösung, da die Fähigkeiten des menschlichen Auges begrenzt sind. Es ist eine zusätzliche Informationsverarbeitung erforderlich, und die Verarbeitung sollte je nach Aufgabenstellung unterschiedlich sein. Manche Menschen müssen das Gesamtbild sehen, während andere die Details betrachten möchten. Hierzu kommen unterschiedliche Methoden zum Einsatz.
6.3 Subtrahieren einer konstanten Steigung
Mit Sondenmikroskopen aufgenommene Oberflächenbilder weisen typischerweise eine Gesamtneigung auf. Dies kann mehrere Gründe haben. Erstens kann die Neigung aufgrund einer ungenauen Platzierung der Probe relativ zur Sonde auftreten; zweitens kann es zu einer Temperaturdrift kommen, die zu einer Verschiebung der Sonde relativ zur Probe führt; Drittens kann es an der Nichtlinearität der Piezoscanner-Bewegungen liegen. Die Anzeige der Neigung beansprucht viel nutzbaren Platz im SPM-Rahmen, sodass kleine Details des Bildes unsichtbar werden. Um diesen Nachteil zu beseitigen, wird die Operation des Subtrahierens einer konstanten Steigung durchgeführt. Dazu wird im ersten Schritt die Näherungsebene mithilfe der Methode der kleinsten Quadrate ermittelt
P(x,y), das minimale Abweichungen vom Oberflächenrelief Z = f(x,y) aufweist, dann wird diese Ebene vom SPM-Bild subtrahiert. Es empfiehlt sich, die Subtraktion je nach Art der Steigung auf unterschiedliche Weise durchzuführen.
Wenn die Neigung im SPM-Bild auf die Neigung der Probe relativ zur Sondenprobe zurückzuführen ist, empfiehlt es sich, die Ebene um einen Winkel zu drehen, der dem Winkel zwischen der Normalen der Ebene und der Z-Achse entspricht; in diesem Fall werden die Oberflächenkoordinaten Z = f(x,y) entsprechend räumlicher Rotationstransformationen transformiert. Allerdings ist es mit dieser Transformation möglich, ein Bild der Oberfläche in Form einer mehrwertigen Funktion Z = f(x,y) zu erhalten. Wenn die Neigung auf thermische Drift zurückzuführen ist, reduziert sich das Verfahren zum Subtrahieren der Neigung auf das Subtrahieren der Z-Koordinaten der Ebene von den Z-Koordinaten des SPM-Bildes:
Das Ergebnis ist ein Array mit einem kleineren Wertebereich und feine Details im Bild werden in mehr Farben reflektiert und sind dadurch besser sichtbar.
6.4 Beseitigung von Verzerrungen im Zusammenhang mit Scannermängeln
Die Unvollkommenheit der Scannereigenschaften führt dazu, dass das SPM-Bild eine Reihe spezifischer Verzerrungen enthält. Teilweise Unvollkommenheiten des Scanners, wie z. B. Ungleichheit des Vorwärts- und Rückwärtshubs des Scanners (Hysterese), Kriechen und Nichtlinearität der Piezokeramik, werden durch Hardware und die Wahl optimaler Scanmodi ausgeglichen. Dennoch enthalten SPM-Bilder Verzerrungen, die auf Hardwareebene nur schwer zu beseitigen sind. Da insbesondere die Bewegung des Scanners in der Probenebene die Position der Sonde über der Oberfläche beeinflusst, sind SPM-Bilder eine Überlagerung des echten Reliefs und einer Oberfläche zweiter (und oft höherer) Ordnung.
Um diese Art von Verzerrung zu beseitigen, wird die Methode der kleinsten Quadrate verwendet, um eine Näherungsfläche zweiter Ordnung P(x,y) zu finden, die minimale Abweichungen von der ursprünglichen Funktion Z = f(x,y) aufweist, und dann ist diese Fläche vom ursprünglichen SPM-Bild subtrahiert:
Eine andere Art von Verzerrung ist mit der Nichtlinearität und Nichtorthogonalität der Scannerbewegungen in der X- und Y-Ebene verbunden. Dies führt zu einer Verzerrung geometrischer Proportionen in verschiedenen Teilen des SPM-Bildes der Oberfläche. Um solche Verzerrungen zu beseitigen, wird ein Verfahren zur Korrektur von SPM-Bildern mithilfe einer Korrekturkoeffizientendatei durchgeführt, die erstellt wird, wenn ein bestimmter Scanner Teststrukturen mit einem bekannten Relief scannt.
6.5 SPM-Bilder filtern
Geräterauschen (hauptsächlich das Rauschen hochempfindlicher Eingangsverstärker), Instabilität des Sonden-Proben-Kontakts beim Scannen, externe akustische Geräusche und Vibrationen führen dazu, dass SPM-Bilder neben nützlichen Informationen eine Rauschkomponente aufweisen. Teilweises Rauschen in SPM-Bildern kann mithilfe von Software entfernt werden.
6.6 Medianfilterung
Die Medianfilterung liefert gute Ergebnisse beim Entfernen von hochfrequentem Zufallsrauschen in SPM-Frames. Hierbei handelt es sich um eine nichtlineare Bildverarbeitungsmethode, deren Kern wie folgt erklärt werden kann. Es wird ein funktionierendes Filterfenster ausgewählt, das aus nxn Punkten besteht (zur Sicherheit nehmen wir ein 3 x 3-Fenster, d. h. mit 9 Punkten (Abb. 24)).
Während des Filtervorgangs bewegt sich dieses Fenster von Punkt zu Punkt über den Rahmen und der folgende Vorgang wird ausgeführt. Die Amplitudenwerte des SPM-Bildes an den Punkten dieses Fensters werden in aufsteigender Reihenfolge angeordnet und der Wert in der Mitte der sortierten Zeile wird in den zentralen Punkt des Fensters eingegeben. Anschließend wird das Fenster zum nächsten Punkt verschoben und der Sortiervorgang wiederholt. Starke zufällige Ausreißer und Fehler bei einer solchen Sortierung landen daher immer am Rand des sortierten Arrays und werden nicht in das endgültige (gefilterte) Bild einbezogen. Bei dieser Verarbeitung verbleiben ungefilterte Bereiche an den Rändern des Rahmens, die im endgültigen Bild verworfen werden.
6.7 Methoden zur Rekonstruktion einer Oberfläche aus ihrem SPM-Bild
Einer der Nachteile aller Verfahren der Rastersondenmikroskopie ist die endliche Größe des Arbeitsteils der verwendeten Sonden. Dies führt zu einer erheblichen Verschlechterung der räumlichen Auflösung von Mikroskopen und zu erheblichen Verzerrungen in SPM-Bildern beim Scannen von Oberflächen mit Reliefunregelmäßigkeiten, die mit den charakteristischen Abmessungen des Arbeitsteils der Sonde vergleichbar sind.
Tatsächlich ist das im SPM erhaltene Bild eine „Faltung“ der Sonde und der untersuchten Oberfläche. Der Vorgang der „Faltung“ der Sondenform mit dem Oberflächenrelief ist im eindimensionalen Fall in Abb. dargestellt. 25.
Dieses Problem kann teilweise durch kürzlich entwickelte Methoden zur Rekonstruktion von SPM-Bildern gelöst werden, die auf der Computerverarbeitung von SPM-Daten unter Berücksichtigung der spezifischen Form der Sonden basieren. Die effektivste Methode zur Oberflächensanierung ist die numerische Dekonvolutionsmethode, die die experimentell durch Scannen von Teststrukturen (mit bekannter Oberflächentopographie) erhaltene Sondenform nutzt.
Es ist zu beachten, dass eine vollständige Wiederherstellung der Probenoberfläche nur möglich ist, wenn zwei Bedingungen erfüllt sind: Die Sonde berührte während des Scanvorgangs alle Punkte der Oberfläche und zu jedem Zeitpunkt berührte die Sonde nur einen Punkt der Oberfläche. Wenn die Sonde beim Scannen bestimmte Bereiche der Oberfläche nicht erreichen kann (z. B. wenn die Probe überhängende Bereiche des Reliefs aufweist), erfolgt nur eine teilweise Wiederherstellung des Reliefs. Darüber hinaus gilt: Je mehr Punkte auf der Oberfläche die Sonde beim Scannen berührt, desto zuverlässiger lässt sich die Oberfläche rekonstruieren.
In der Praxis sind das SPM-Bild und die experimentell bestimmte Sondenform zweidimensionale Arrays diskreter Werte, für die die Ableitung eine schlecht definierte Größe ist. Anstatt daher in der Praxis die Ableitung diskreter Funktionen zu berechnen, wird bei der numerischen Entfaltung von SPM-Bildern die Bedingung des minimalen Abstands zwischen der Sonde und der Oberfläche verwendet, wenn mit einer konstanten Durchschnittshöhe gescannt wird.
In diesem Fall kann die Höhe des Oberflächenreliefs an einem bestimmten Punkt als Mindestabstand zwischen dem Sondenpunkt und dem entsprechenden Oberflächenpunkt für eine gegebene Position der Sonde relativ zur Oberfläche angesehen werden. In ihrer physikalischen Bedeutung entspricht diese Bedingung der Bedingung der Gleichheit der Ableitungen, ermöglicht jedoch die Suche nach Kontaktpunkten der Sonde mit der Oberfläche mit einer geeigneteren Methode, was die Zeit für die Rekonstruktion des Reliefs erheblich verkürzt.
Zur Kalibrierung und Bestimmung der Form des Arbeitsteils der Sonden werden spezielle Teststrukturen mit bekannten Oberflächenreliefparametern verwendet. Die Typen der gängigsten Teststrukturen und ihre charakteristischen Bilder, die mit einem Rasterkraftmikroskop gewonnen wurden, sind in Abb. dargestellt. 26 und Abb. 27.
Mit dem Kalibriergitter in Form scharfer Spitzen können Sie die Spitze der Sonde genau definieren, während das rechteckige Gitter dabei hilft, die Form der Seitenfläche wiederherzustellen. Durch die Kombination der Ergebnisse des Scannens dieser Gitter ist es möglich, die Form des Arbeitsteils der Sonden vollständig wiederherzustellen.
7. Modernes SPM
1) Rastersondenmikroskop SM-300
Entwickelt, um die morphologischen Merkmale und die Struktur des Porenraums zu untersuchen. Der SM-300 (Abbildung 28) verfügt über ein integriertes optisches Positionierungsmikroskop, das die endlose Suche nach einem interessierenden Bereich überflüssig macht. Ein farbiges optisches Bild der Probe wird bei leichter Vergrößerung auf einem Computermonitor angezeigt. Das Fadenkreuz auf dem optischen Bild entspricht der Position des Elektronenstrahls. Mithilfe des Fadenkreuzes können Sie schnell positionieren, um einen Bereich zu definieren, der für die Rasteranalyse von Interesse ist
Reis. 28. SPM SM-300 Elektronenmikroskop. Die optische Positionierungseinheit ist mit einem separaten Rechner ausgestattet, was ihre Hardwareunabhängigkeit vom Scanmikroskop gewährleistet.
FÄHIGKEITEN SM - 300
· Garantierte Auflösung von 4 nm
· Einzigartiges optisches Positionierungsmikroskop (optional)
· Intuitive Windows®-Software
Vollständig computergesteuertes Scanmikroskop und Bildgebung
Standard-TV-Ausgang mit digitaler Signalverarbeitung
· Computersteuerung des Niedervakuumsystems (optional)
· Alle Untersuchungen werden an der gleichen Position der Applikatorachse (12 mm) durchgeführt.
Elementare Röntgenmikroanalyse im Niedrig- und Hochvakuummodus (optional)
Fähigkeit, bei normalen Raumlichtverhältnissen zu arbeiten
· Untersuchung nichtleitender Proben ohne deren vorherige Vorbereitung
Auflösung 5,5 nm im Niedrigvakuummodus
· Softwaresteuerung der Modusumschaltung
Wählbarer Kammervakuumbereich 1,3 – 260 Pa
· Anzeigen von Bildern auf einem Computerbildschirm
· Serieller V-Rückstreu-Robinson-Sensor
2) Supra50VP hochauflösendes Rastersondenmikroskop mit INCA Energy+Oxford Mikroanalysesystem.
Das Gerät (Abb. 29) ist für die Forschung in allen Bereichen der Materialwissenschaften, im Bereich der Nano- und Biotechnologien bestimmt. Das Gerät ermöglicht die Arbeit mit großen Proben und unterstützt außerdem den variablen Druckmodus zur Untersuchung nichtleitender Proben ohne Vorbereitung. Reis. 29. SPM Supra50VP
OPTIONEN:
Beschleunigungsspannung 100 V – 30 kV (Feldemissionskathode)
Max. auf x 900000 erhöhen
Ultrahohe Auflösung – bis zu 1 nm (bei 20 kV)
Vakuummodus mit variablem Druck von 2 bis 133 Pa
Beschleunigungsspannung – von 0,1 bis 30 kV
Motorisierter Tisch mit fünf Freiheitsgraden
Auflösung des EDX-Detektors 129 eV auf der Ka(Mn)-Linie, Zählrate bis zu 100.000 Zählungen/s
3) Modernisiertes Mikroskop LEO SUPRA 25 mit „GEMINI“-Säule und Feldemission (Abb. 30).
– Entwickelt für die Nanoanalyseforschung
– Kann sowohl EDX- als auch WDX-Systeme für die Mikroanalyse anschließen
– Auflösung 1,5 nm bei 20 kV, 2 nm bei 1 kV.
Abschluss
Durch den Einsatz der Sondenmikroskopie konnten in den vergangenen Jahren einzigartige wissenschaftliche Ergebnisse in verschiedenen Bereichen der Physik, Chemie und Biologie erzielt werden.
Waren die ersten Rastersondenmikroskope Indikatorgeräte für die qualitative Forschung, so ist ein modernes Rastersondenmikroskop ein Gerät, das bis zu 50 verschiedene Forschungstechniken integriert. Es ist in der Lage, bestimmte Bewegungen im Sonden-Probe-System mit einer Genauigkeit von 0,1 % auszuführen, den Sondenformfaktor zu berechnen und Präzisionsmessungen ziemlich großer Größen (bis zu 200 µm in der Scanebene und 15–20 µm in der Höhe) durchzuführen ) und ermöglichen gleichzeitig eine submolekulare Auflösung.
Rastersondenmikroskope haben sich zu einer der beliebtesten Instrumentenklassen für die wissenschaftliche Forschung auf dem Weltmarkt entwickelt. Es entstehen ständig neue Gerätedesigns, die auf verschiedene Anwendungen spezialisiert sind.
Die dynamische Entwicklung der Nanotechnologie erfordert einen immer stärkeren Ausbau der Leistungsfähigkeit der Forschungstechnologie. Weltweit arbeiten Hightech-Unternehmen an der Schaffung von Forschungs- und Technologie-Nanokomplexen, die ganze Gruppen analytischer Methoden vereinen, wie zum Beispiel: Raman-Spektroskopie, Lumineszenzspektroskopie, Röntgenspektroskopie zur Elementaranalyse, hochauflösende optische Mikroskopie, Elektronenmikroskopie , fokussierte Ionentechniken, Bündel. Systeme erwerben leistungsstarke intellektuelle Fähigkeiten: die Fähigkeit, Bilder zu erkennen und zu klassifizieren, die erforderlichen Kontraste hervorzuheben, sind mit der Fähigkeit ausgestattet, Ergebnisse zu simulieren, und Rechenleistung wird durch den Einsatz von Supercomputern bereitgestellt.
Die zu entwickelnde Technologie verfügt über leistungsstarke Fähigkeiten, das ultimative Ziel ihres Einsatzes besteht jedoch darin, wissenschaftliche Ergebnisse zu erzielen. Die Beherrschung der Fähigkeiten dieser Technologie an sich ist eine Aufgabe von hoher Komplexität und erfordert die Ausbildung hochqualifizierter Spezialisten, die in der Lage sind, diese Geräte und Systeme effektiv zu nutzen.
Referenzliste
1. Nevolin V. K. Grundlagen der Tunnelsondentechnologie / V. K. Nevolin, - M.: Nauka, 1996, - 91 S.
2. Kulakov Yu. A. Elektronenmikroskopie / Yu. A. Kulakov, – M.: Znanie, 1981, – 64 S.
3. Volodin A.P. Rastermikroskopie / A. P. Volodin, – M.: Nauka, 1998, – 114 S.
4. Rastersondenmikroskopie von Biopolymeren / Herausgegeben von I. V. Yaminsky, - M.: Scientific World, 1997, - 86 S.
5. Mironov V. Grundlagen der Rastersondenmikroskopie / V. Mironov, – M.: Tekhnosphere, 2004, – 143 S.
6. Rykov S. A. Rastersondenmikroskopie von Halbleitermaterialien / S. A. Rykov, – St. Petersburg: Nauka, 2001, – 53 S.
7. Bykov V. A., Lazarev M. I. Rastersondenmikroskopie für Wissenschaft und Industrie / V. A. Bykov, M. I. Lazarev // Elektronik: Wissenschaft, Technologie, Wirtschaft, – 1997, – Nr. 5, – Mit. 7 – 14.